中国组织工程研究 ›› 2013, Vol. 17 ›› Issue (35): 6293-6299.doi: 10.3969/j.issn.2095-4344.2013.35.012
• 骨与关节生物力学 bone and joint biomechanics • 上一篇 下一篇
虚拟现实验证仿真多路况下人体下肢行走状态
王培培,杨 鹏
- 河北工业大学控制科学与工程学院,天津市 300130
Lower limb walking state under different road conditions verified with virtual reality technology
Wang Pei-pei, Yang Peng
- Control Science and Engineering College, Hebei University of Technology, Tianjin 300130, China
摘要:
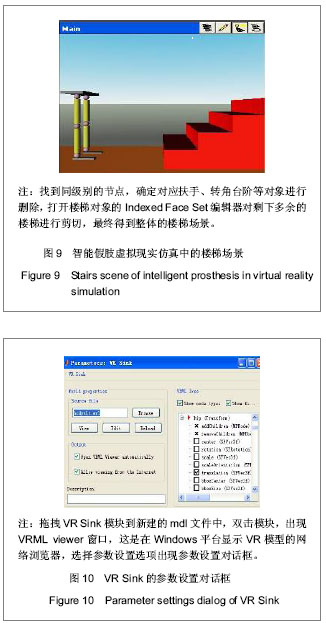
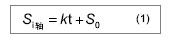
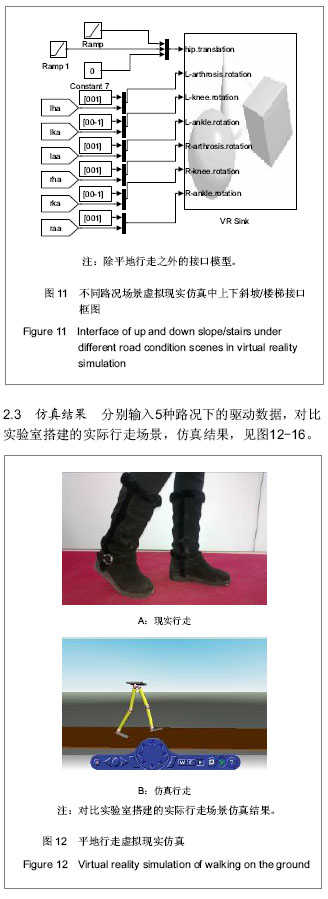
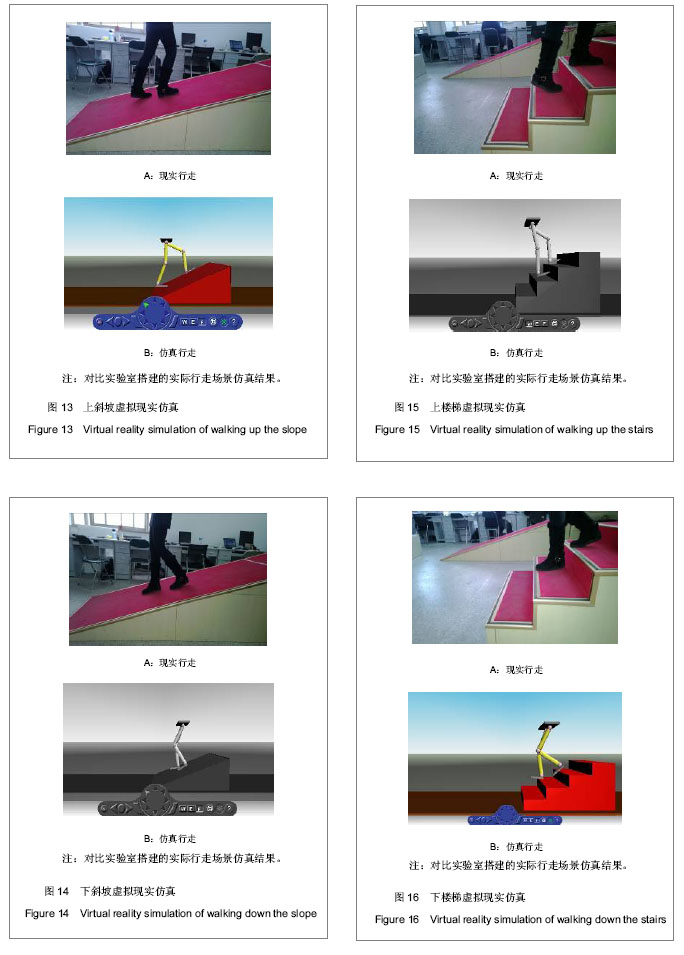
背景:在智能下肢假肢控制器的研究过程中,无论采用肌电信号还是运动与动力学信息相结合等方式识别路况,其结果都通常抽象难懂。 目的:从直观运动学分析的角度说明不同路况之间的异同,并利用虚拟现实技术对多种路况场景进行建模和仿真以使识别结果形象化、直观化。 方法:用Simulink下的机械建模模块Simmechanics搭建人体下肢模型框图并进行输出运动学分析,比较各种路况下运动学信息的异同,结合虚拟现实工具箱建立多路况场景,用运动学信息驱动虚拟模型运动,完成不同路况的验证仿真。 结果与结论:直观利用运动学信息区分多种路况有一定的局限性,需结合其他手段或信号;虚拟现实工具箱能很好地再现数据所对应的运动场景。仿真结果表明,虚拟现实建模方法能够真实形象再现人体下肢在平地、斜坡以及楼梯的行走状况,使数据所反映的运动状态不再单调抽象,使识别结果形象化,可作为验证路况识别结果的手段,为智能假肢模式识别工作提供了一个良好的验证显示平台。
中图分类号:
.jpg)
.jpg)

.jpg)