[1] 刘光,段翠海,张海军.介入手术输送系统研究进展[J].介入放射学杂志,2018,27(7):695-699.
[2] TAKAYAMA T, PHELAN PJ, MATSUMURA JS. Directional tip control technique for optimal stent graft alignment in angulated proximal aortic landing zones. J Vasc Surg Cases Innov Tech. 2017;3(2):51-56.
[3] LEONG BDK, JOSEPH FS. Total percutaneous femoral approach for branched custom-made device endovascular repair of thoracoabdominal aneurysm. Ann Vasc Dis. 2020;13(3):347-350.
[4] MANZUR M, MAGEE GA, ZIEGLER KR, et al. Caudally directed in situ fenestrated endografting for emergent thoracoabdominal aortic aneurysm repair. J Vasc Surg Cases Innov Tech. 2021;7(3):553-557.
[5] GYANO M, CSOBAY-NOVAK C. A Modified through and through guidewire steerable sheath technique for transfemoral access to visceral arteries with hostile anatomy. EJVES Vasc Forum. 2021;51:27-28.
[6] MAZZACCARO D, CASTRONOVO EL, RIGHINI P, et al. Use of steerable catheters for endovascular procedures: report of a case and literature review. Catheter Cardiovasc Interv. 2020;95(5):971-977.
[7] LIM G, PARK K, SUGIHARA M, et al. Future of active catheters. Sensors and actuators a: physical. 1996;56(1):113-121.
[8] DE BOER J. Multi-lumen steerable catheter for therapeutically treating patient, comprises flexible catheter shaft and hub including actuators, where actuators are activated so that pressures of fluids are increased in steering lumens, US2007060997-A1. <Go to ISI>://DIIDW:2007438521.
[9] WATSON JR. Asymmetric dual directional steerable catheter sheath: US, US8500733 B2. 2013.
[10] ALI A, PLETTENBURG DH, BREEDVELD P. Steerable catheters in cardiology: classifying steerability and assessing future challenges. IEEE Trans Biomed Eng. 2016;63(4):679-693.
[11] ALI A, SAKES A, ARKENBOUT EA, et al. Catheter steering in interventional cardiology: mechanical analysis and novel solution. Proc Inst Mech Eng H. 2019;233(12):1207-1218.
[12] TANGEN GA, MANSTAD-HULAAS F, NYPAN E, et al. Manually steerable catheter with improved agility. Clin Med Insights Cardiol. 2018;12: 117954681775143.
[13] MAO H, WANG F, BAO J, et al. conventional endovascular devices. Endovascular Surgery and Devices. Springer Nature. 2018.
[14] MARTIN JT, HULSBERG PC, SOULE E, et al. Welcome to the new era: a completely wireless interventional procedure. Cureus. 2018;10(9): e3337.
[15] POTT A, PETSCHER K, BAUMHARDT M, et al. Novel spiral mapping catheter facilitates observation of the time-to-pulmonary vein isolation during cryoballoon ablation. Heart Vessels. 2019;34(3):496-502.
[16] KUMAR V, KATAYAMA M, PEAVLER R, et al. Real-Time visualization of an acoustically active injection catheter with ultrasound imaging: algorithm and in vivo validation in a swine model. IEEE Trans Biomed Eng. 2019;66(11):3212-3219.
[17] KUMAR V, LIU R, KINNICK RR, et al. Unambiguous identification and visualization of an acoustically active catheter by ultrasound imaging in real time: theory, algorithm, and phantom experiments. IEEE Trans Biomed Eng. 2018;65(7):1468-1475.
[18] KATAYAMA M, ZARBATANY D, CHA SS, et al. Acoustically active catheter for intracardiac navigation by color doppler ultrasonography. Ultrasound Med Biol. 2017;43(9):1888-1896.
[19] BELOHLAVEK M, KATAYAMA M, VAITKUS VV, et al. A real-time color doppler marker for echocardiographic guidance of an acoustically active extracorporeal membrane oxygenation cannula. J Ultrasound Med. 2019;38(7):1875-1885.
[20] SHAIKH ZA, EILENBERG MF, COHEN TJ. The amigo remote catheter system: from concept to bedside. J Innov Card Rhythm Manag. 2017; 8(8):2795-2802.
[21] GREIGARN T, JACKSON R, LIU T, et al. Experimental validation of the pseudo-rigid-body model of the MRI-actuated catheter. IEEE Int Conf Robot Autom. 2017;2017:3600-3605.
[22] LIU T, LOMBARD POIROT N, GREIGARN T, et al. Design of a magnetic resonance imaging guided magnetically actuated steerable catheter. J Med Device. 2017;11(2):0210041-2100411.
[23] ALIPOUR A, MEYER ES, DUMOULIN CL, et al. MRI conditional actively tracked metallic electrophysiology catheters and guidewires with miniature tethered radio-frequency traps: theory, design, and validation. IEEE Trans Biomed Eng. 2020;67(6):1616-1627.
[24] YIN X, GUO S, SONG Y. Magnetorheological fluids actuated haptic-based teleoperated catheter operating system. Micromachines (Basel). 2018.
[25] YANG X, WANG H, SUN L, et al. Operation and force analysis of the guide wire in a minimally invasive vascular interventional surgery robot system. Chin J Mech Eng. 2015;28(2):249-257.
[26] CHA HJ, YI BJ, WON JY. An assembly-type master–slave catheter and guidewire driving system for vascular intervention. Proc Inst Mech Eng H. 2016;231(1):69-79.
[27] ZHOU J, MEI Z, MIAO J, et al. A remote-controlled robotic system with safety protection strategy based on force-sensing and bending feedback for transcatheter arterial chemoembolization. Micromachines. 2020;11(9):805.
[28] CHOI J, PARK S, KIM YH, et al. A vascular intervention assist device using bi-motional roller cartridge structure and clinical evaluation. Biosensors (Basel). 2021;11(9):329.
[29] MA X, ZHOU J, ZHANG X, et al. Design of a new catheter operating system for the surgical robot. Appl Bionics Biomech. 2021;2021(1):1-9.
[30] MA X, ZHOU J, ZHANG X, et al. Development of a robotic catheter manipulation system based on BP neural network PID controller. Appl Bionics Biomech. 2020;2020:8870106.
[31] FAGOGENIS G, MENCATTELLI M, MACHAIDZE Z, et al. Autonomous robotic intracardiac catheter navigation using haptic vision. Sci Robot. 2019;4(29):eaaw1977.
[32] TADOKORO S, MURAKAMI T, FUJI S, et al. An elliptic friction drive element using an ICPF actuator. IEEE Control Systems Magazine. 1997; 17(3):60-68.
[33] SMELA EA. Conjugated polymer actuators for biomedical applications. Adv Mater. 2010;15(6):481-494.
[34] DELLASANTA A, MAZZOLDI A, DEROSSI D. Steerable microcatheters actuated by embedded conducting polymer structures. J Intell Mater Syst Struct. 1996;7(3):292-300.
[35] SEWA S, ONISHI K, ASAKA K, et al. Polymer actuator driven by ion current at low voltage, applied to catheter system//Eleventh International Workshop on Micro Electro Mechanical Systems. IEEE. 1998.
[36] FANG BK. Development of active guide-wire for cardiac catheterization by using ionic polymer-metal composites. Ifmbe Proceed. 2008;23(1): 340-343.
[37] HAGA Y, MIZUSHIMA M, MATSUNAGA T, et al. Medical and welfare applications of shape memory alloy microcoil actuators. Smart Materials and Structures. 2005;14(5):S266-S272.
[38] BLANC L, DELCHAMBRE A, LAMBERT P. Flexible medical devices: review of controllable stiffness solutions. Actuators. 2017;6(3):23.
[39] AYVALI E, LIANG CP, HO M, et al. Towards a discretely actuated steerable cannula for diagnostic and therapeutic procedures. Int J Rob Res. 2012;31(5):588-603.
[40] LU YH, MANI K, PANIGRAHI B, et al. A shape memory alloy-based miniaturized actuator for catheter interventions. Cardiovasc Eng Technol. 2018;9(3):405-413.
[41] SELVARAJ M, TAKAHATA K. Electrothermally driven hydrogel-on-flex-circuit actuator for smart steerable catheters. Micromachines. 2020; 11(1):68.
|
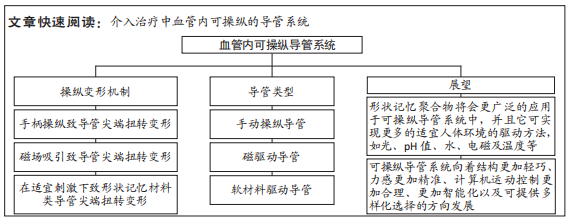
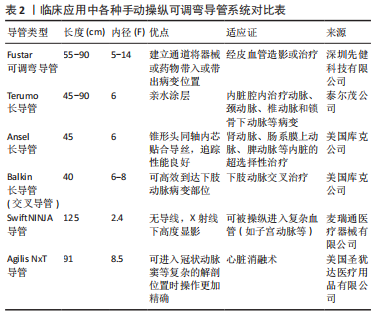
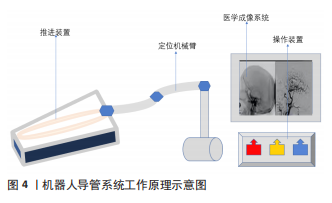

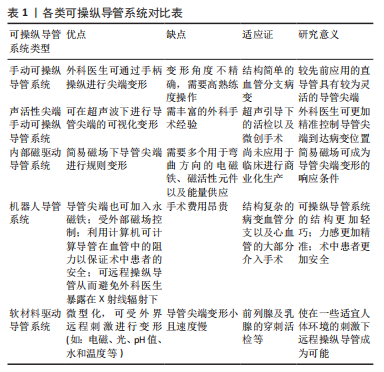
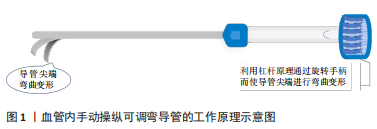 目前手动可操纵导管虽已广泛应用于临床中,但面对一些复杂的血管病变情况,由于力在传导过程中的不断衰减,使尖端不能达到外科医生所需要的精准变形。因此,这种手动操纵导管系统需要外科医生具有丰富的临床经验而受到使用限制。磁驱动导管主要应用于临床的为机器人导管系统,在其导管尖端安装了一个永久磁铁,通过利用计算机调节磁场的方向来控制导管尖端的灵活运动,它能准确实现导管定位,但这种驱动系统给患者带来了高昂的手术费用,因此不能普遍应用于临床。相较于前两种驱动导管来说,包括形状记忆聚合物类材料在内的软材料驱动导管系统因其价格低廉、具有较好的生物相容性并且能在适宜人体的刺激下达到精准的尖端变形而备受广大研究者的青睐。下面将文中所提到的几种主要类型的可操纵导管系统进行对比成表[7-41],见表1。
目前手动可操纵导管虽已广泛应用于临床中,但面对一些复杂的血管病变情况,由于力在传导过程中的不断衰减,使尖端不能达到外科医生所需要的精准变形。因此,这种手动操纵导管系统需要外科医生具有丰富的临床经验而受到使用限制。磁驱动导管主要应用于临床的为机器人导管系统,在其导管尖端安装了一个永久磁铁,通过利用计算机调节磁场的方向来控制导管尖端的灵活运动,它能准确实现导管定位,但这种驱动系统给患者带来了高昂的手术费用,因此不能普遍应用于临床。相较于前两种驱动导管来说,包括形状记忆聚合物类材料在内的软材料驱动导管系统因其价格低廉、具有较好的生物相容性并且能在适宜人体的刺激下达到精准的尖端变形而备受广大研究者的青睐。下面将文中所提到的几种主要类型的可操纵导管系统进行对比成表[7-41],见表1。
 虽然先前有些许文献对可操纵导管系统的研究进展以及临床应用进行了讨论,但已时间久远并且综述的可操纵导管系统类型较为单一,缺少形状记忆材料类导管和机器人导管系统的介绍。文章就可调弯导管的工作原理、类型以及发展前景进行更新综述,以期为未来可操纵导管系统的研究提供有价值的参考方向。
虽然先前有些许文献对可操纵导管系统的研究进展以及临床应用进行了讨论,但已时间久远并且综述的可操纵导管系统类型较为单一,缺少形状记忆材料类导管和机器人导管系统的介绍。文章就可调弯导管的工作原理、类型以及发展前景进行更新综述,以期为未来可操纵导管系统的研究提供有价值的参考方向。
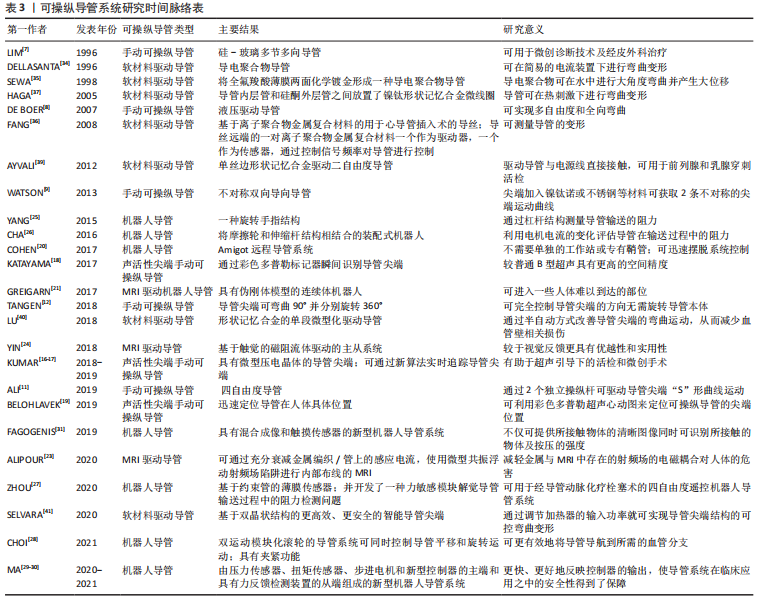 目前的研究结果在一定程度上满足了在微创介入手术之中外科医生对可操纵导管变形的需求。可操纵导管系统由单纯的手柄操纵变形机制发展到外科医生可在超声引导下将导管尖端在体内变为可视化,再到可操纵导管系统可在外部磁场的作用下即可达到尖端变形并可通过简单的编程算法与计算机相连,在计算机中可显示出导管在血管内受到的阻力等,这些都极大增加了可操纵导管系统在临床应用中的安全性。近几年,形状记忆聚合物材料由于其价格低廉并且较其他材料具有更好的生物相容性而深受广大研究者的青睐,虽已有研究者试图将其运用于可操纵导管系统之中,但研究数量较少且质量较低,但相信在不久的将来,将形状记忆聚合物材料应用于可操纵导管系统之中将成为研究的热点。
目前的研究结果在一定程度上满足了在微创介入手术之中外科医生对可操纵导管变形的需求。可操纵导管系统由单纯的手柄操纵变形机制发展到外科医生可在超声引导下将导管尖端在体内变为可视化,再到可操纵导管系统可在外部磁场的作用下即可达到尖端变形并可通过简单的编程算法与计算机相连,在计算机中可显示出导管在血管内受到的阻力等,这些都极大增加了可操纵导管系统在临床应用中的安全性。近几年,形状记忆聚合物材料由于其价格低廉并且较其他材料具有更好的生物相容性而深受广大研究者的青睐,虽已有研究者试图将其运用于可操纵导管系统之中,但研究数量较少且质量较低,但相信在不久的将来,将形状记忆聚合物材料应用于可操纵导管系统之中将成为研究的热点。