中国组织工程研究 ›› 2022, Vol. 26 ›› Issue (12): 1861-1865.doi: 10.12307/2022.508
• 骨科植入物 orthopedic implant • 上一篇 下一篇
计算机导航下设计经皮穿刺置入空心椎弓根螺钉的轨道
袁翠华1,林 旺1,蒋 垚2,刘成招1
- 1福建医科大学附属闽东医院骨科,福建省福安市 355000;2苏州大学医学部临床医学院,江苏省苏州市 215000
Screw track in computer navigation-assisted percutaneous hollow pedicle screw placement
Yuan Cuihua1, Lin Wang1, Jiang Yao2, Liu Chengzhao1
- 1Department of Orthopedics, Mindong Hospital Affiliated to Fujian Medical University, Fuan 355000, Fujian Province, China; 2School of Clinical Medicine, Medical College of Soochow University, Suzhou 215000, Jiangsu Province, China
摘要:
文题释义:
二维计算机导航:应用二维计算机导航系统通过X射线即时获得透视图,然后通过计算机导航系统辅助引导下置钉,无需术前采集图像,而且术中可实时显示图像,但不足之处在于所得图像为二维图像,不如三维图像精确。
依赖CT三维导航:术前对目标椎体进行薄层CT扫描三维重建,制定手术方案,术中在三维CT导航引导下放置椎弓根钉。由于CT良好的三维图像,可实时显像,置钉具有较高的精确性。
背景:经皮穿刺安放椎弓根钉时,不同的术者对进钉点及进钉角度各家报道不一,使得经皮微创椎弓根螺钉技术的应用受到了限制。目前行经皮椎弓根钉技术治疗胸腰椎骨折时,大多根据术中经验或依据术中X射线反复透视引导下置钉,患者和术者受到医源性损害较大。
目的:分别从尸体解剖学和影像学角度研究计算机导航下设计经皮穿刺置入椎弓根螺钉轨道的可行性。
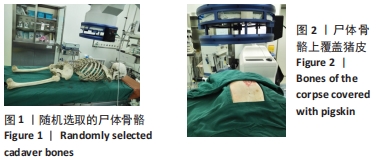
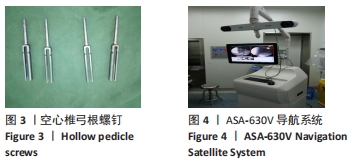
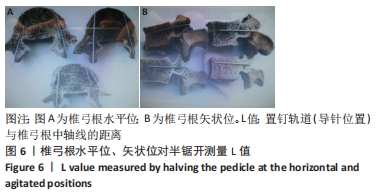
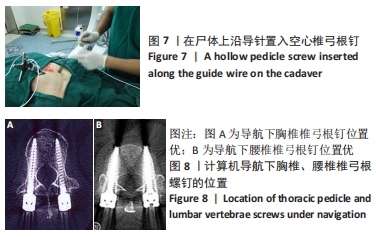
方法:①随机抽取10具骨骼标本T10-L3共60个椎体120个椎弓根,在计算机导航下参考最佳进钉点和最佳进钉角度来设计椎弓根钉的初步轨道,测量并记录置钉轨道与椎弓根中轴线之间的最长距离,统计置钉轨道的优良率,分析导航下置钉轨道的精确性;②随机抽取10具脊柱骨骼T10-L3共60个椎体,将计算机导航下经皮置钉的方法设定为实验组,将肉眼直视下的置钉方法设定为对照组,分别统计应用两组方法在尸体骨骼标本中的置钉优良率。
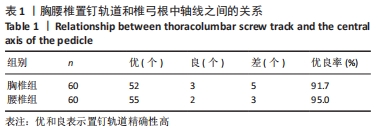
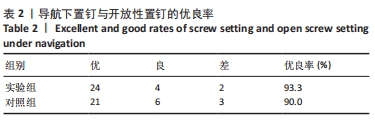
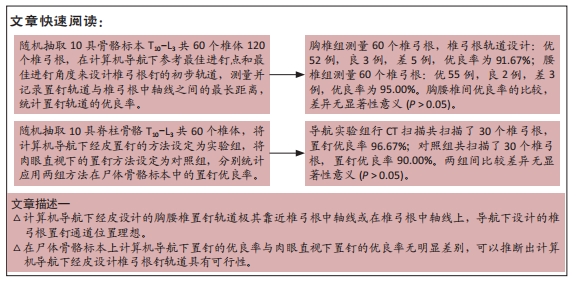
结果与结论:①胸椎组测量60个椎弓根,椎弓根轨道设计:优52例,良3例,差5例,优良率为91.67%;腰椎组测量60个椎弓根:优55例,良2例,差3例,优良率为95.00%;胸腰椎间优良率的比较,差异无显著性意义(P > 0.05);②导航实验组行CT扫描共扫描了30个椎弓根,置钉优良率96.67%;对照组共扫描了30个椎弓根,置钉优良率90.00%,两组间比较差异无显著性意义(P > 0.05);③计算机导航下经皮设计的胸腰椎置钉轨道极其靠近椎弓根中轴线或在椎弓根中轴线上,导航下设计的椎弓根置钉通道位置理想;在尸体骨骼标本上计算机导航下置钉的优良率与肉眼直视下置钉的优良率无明显差别,可以推断出计算机导航下经皮设计椎弓根钉轨道具有可行性。
https://orcid.org/0000-0002-5130-4069 (袁翠华)
中国组织工程研究杂志出版内容重点:人工关节;骨植入物;脊柱;骨折;内固定;数字化骨科;组织工程
中图分类号: