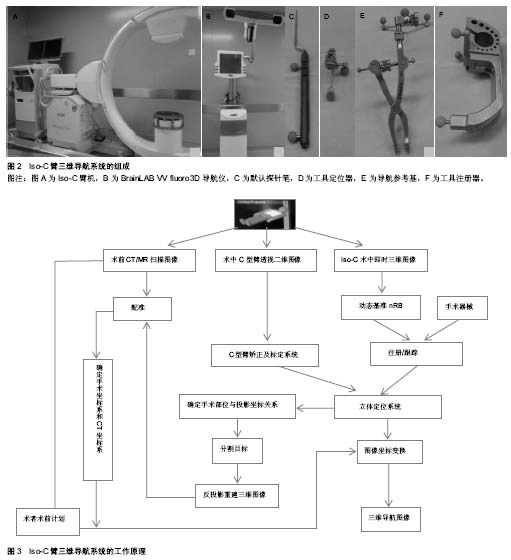
2.1 Iso-C臂三维导航系统的组成、工作原理以及与其他计算机导航系统的比较 Iso-C臂三维导航系统主要由4部分组成(
图2,3):①装有工具定位器的器械(图2C,D),这些含工具定位球器械的几何参数通过工具注册器(图2F)自动注册储存于导航仪中(图2B)。②固定于手术部位动态参考基(图2F)能够保证导航仪精确调整手术部位相对空间位置,以弥补由于患者呼吸或术者操作造成的脊柱解剖结构位置变化。③电动C型臂(图2A)获取导航影像资料传输至导航仪中并进行三维图像重建,然后构建导航坐标系统,动态显示手术器械和骨结构的相对位置。④红外相机系统主要负责接受信号,它能够精确识别术野中已注册过的器械和动态参考基上发出的信号,并传输至导航仪上。
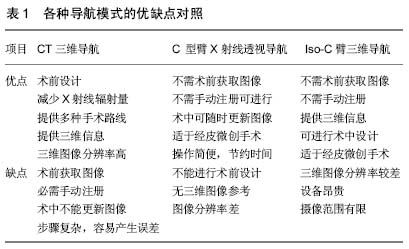
目前脊柱外科常用的导航模式主要有:①CT三维导航系统。术前该系统对手术节段进行薄层扫描(1 mm)后将数据储存于工作站中并自动把图像转化为矢状面,冠状面和横断面以及进行三维立体图像重建。术者可根据获取的影像资料了解脊柱的解剖结构如椎弓根变异、椎体旋转、椎体缺如等情况,术前拟定最优的手术方案,确保每个椎弓根钉以最佳途径置入,并将其保存在导航仪工作站中。该系统不足之处在于患者CT资料只能在术前获取,一旦患者在术中体位发生变化即可导致术前影像数据所虚拟出的解剖结构与术中实际解剖结构之间有误差。因此,需要通过术中反复的匹配,来判断其安全性。在匹配过程中,明显增加了手术时间,且匹配失败率较高,精确度较差。②C型臂透视导航系统,该系统可以动态监测内置物的位置,也可以在连续监测中获取静态影像。术中透视可自动注册,避免了CT三维导航术中匹配过程耗时长缺点。该系统主要用C形臂在术中来获取不同体位的二维影像资料并将其传输到导航系统中,形成二维虚拟影像来指导手术操作。该系统比较适用于较粗大的腰椎椎弓根手术,而在一些细小的颈胸椎后路内固定或严重脊柱侧弯后路内固定中,术中透视效果不好,影像螺钉置入精确度。另外,由于C型臂在术中反复的透视,明显增加了手术者和患者射线暴露量。③Iso-C臂三维导航系统,该系统是在前两者基础上发展的
[4],与CT三维导航系统不同,Iso-C臂三维导航系统主要利用电动C型臂在术中对需要手术的部位连续旋转190°采集影像图像,将图像资料传输至导航仪上并自动进行三维重建并传输至导航仪上。该系统主要采用红外线光学原理,精确识别术野中已注册过的器械和动态参考基上发出的红外信号,精确计算和动态显示器械和骨结构在横断位、冠状位、矢状位的相对位置关系,实时指导手术器械正确方位如脊柱后路内固定中椎弓根螺钉置钉方向。该系统与前两者相比有许多优势(
表1及
图4),其受体位变化影响较小,术中系统可以进行自动匹配,不需要人工进行点、面一一匹配,不增加术者和患者在术中放射量,对脊柱解剖结构没有要求,理论上越复杂越能体现该系统的优越性。随着该技术的逐步完善,有可能逐渐替代其他两种导航模式
[5]。
2.2 Iso-C臂三维导航系统在脊柱侧弯中的应用及相关注意事项 脊柱侧弯指脊柱一个或数个节段向侧方弯曲并伴有椎体旋转、前凸、后凸脊柱畸形,常常伴有肋骨和骨盆的旋转倾斜畸形及椎旁韧带、肌肉的异常
[6]。国外研究发现,低龄儿童患脊柱侧弯比例正在不断上升。随着年龄增长,患者心肺功能逐渐下降,身心健康的发展也明显受到影响,使之成为了日益严重的社会健康问题
[6]。脊柱侧弯在治疗上主要以早期发现、早期预防、早期治疗畸形为原则。
目前,治疗脊柱侧弯主要采用手术治疗方法,尤其是严重的脊柱侧弯。Iso-C臂三维导航系统具有时效性和精确性优势,引导术者以更加精确、更加安全的手术方式进行各种复杂脊柱侧弯手术,提高脊柱矫形手术的成功率。
自Boucher首先将椎弓根螺钉用于后路腰椎融合术以来,经过Harrington、Roy-Camille、Steffee等的改进和发展,椎弓根螺钉固定系统已广泛应用于临床上
[7]。椎弓根螺钉固定系统以其安全,坚强的短节段固定,可靠的三柱稳定性以及对侧弯脊柱具有很好旋转矫正力,广泛应用于各类脊柱的外科手术中,并取得良好的临床效果。特别是各种脊柱侧凸矫形手术,由于脊柱侧弯患者的椎体旋转,椎弓根变异,椎管变形等异常情况,明显增加了脊柱侧弯矫形风险。椎弓根螺钉置入位置不佳,常常导致血管神经损伤等并发症
[1,7]。相关文献报道利用C 型臂透视导航系统进行椎弓根螺钉内固定有10%-40%的置钉位置不理想
[4,8]。
Gertzbein等
[9]研究脊柱椎弓根内固定后行CT复查发现,有28%的螺钉位于椎弓根外。国内殷渠东等
[10]认为椎弓根螺钉位置和修复效果密切相关, 置钉位置不当可以造成神经根损伤、感染、脑脊液漏等并发症。近年来,随着计算机辅助导航系统在骨科领域的运用日益成熟,尤其是Iso-C臂三维导航系统的出现明显提高了椎弓根钉置入的精确性和安全性,从而降低脊柱侧弯矫形手术的风险性
[11]。
Iso-C臂三维导航应用中的注意事项:①术中应避免工具上参考基发生松动或移动,否则椎弓根螺钉轨迹在导航仪上的显示将发生误差,造成误导。②术中应避免导航参考基松动,若参考基与固定棘突发生位移, 则虚拟的解剖结构和实际解剖结构之间将产生的误差,椎弓根置钉准确率将下降。③术中正确放置导航仪,确保最佳红外线示踪信息接收效果,若前方有物体遮挡,将影响红外线接收信息效果。④红外线反射球勿沾血液或其他染色物,必须保持干净,建议红外线反射球一次性使用。因为如果反射球沾染血液或多次使用,可导致注册匹配精度下降,容易发生注册失败,影响手术时间。⑤操作应按监测仪上显示的轨迹轻柔操作, 特别是在局部脊柱操作时。

目前脊柱外科常用的导航模式主要有:①CT三维导航系统。术前该系统对手术节段进行薄层扫描(1 mm)后将数据储存于工作站中并自动把图像转化为矢状面,冠状面和横断面以及进行三维立体图像重建。术者可根据获取的影像资料了解脊柱的解剖结构如椎弓根变异、椎体旋转、椎体缺如等情况,术前拟定最优的手术方案,确保每个椎弓根钉以最佳途径置入,并将其保存在导航仪工作站中。该系统不足之处在于患者CT资料只能在术前获取,一旦患者在术中体位发生变化即可导致术前影像数据所虚拟出的解剖结构与术中实际解剖结构之间有误差。因此,需要通过术中反复的匹配,来判断其安全性。在匹配过程中,明显增加了手术时间,且匹配失败率较高,精确度较差。②C型臂透视导航系统,该系统可以动态监测内置物的位置,也可以在连续监测中获取静态影像。术中透视可自动注册,避免了CT三维导航术中匹配过程耗时长缺点。该系统主要用C形臂在术中来获取不同体位的二维影像资料并将其传输到导航系统中,形成二维虚拟影像来指导手术操作。该系统比较适用于较粗大的腰椎椎弓根手术,而在一些细小的颈胸椎后路内固定或严重脊柱侧弯后路内固定中,术中透视效果不好,影像螺钉置入精确度。另外,由于C型臂在术中反复的透视,明显增加了手术者和患者射线暴露量。③Iso-C臂三维导航系统,该系统是在前两者基础上发展的
[4],与CT三维导航系统不同,Iso-C臂三维导航系统主要利用电动C型臂在术中对需要手术的部位连续旋转190°采集影像图像,将图像资料传输至导航仪上并自动进行三维重建并传输至导航仪上。该系统主要采用红外线光学原理,精确识别术野中已注册过的器械和动态参考基上发出的红外信号,精确计算和动态显示器械和骨结构在横断位、冠状位、矢状位的相对位置关系,实时指导手术器械正确方位如脊柱后路内固定中椎弓根螺钉置钉方向。该系统与前两者相比有许多优势(
表1及
图4),其受体位变化影响较小,术中系统可以进行自动匹配,不需要人工进行点、面一一匹配,不增加术者和患者在术中放射量,对脊柱解剖结构没有要求,理论上越复杂越能体现该系统的优越性。随着该技术的逐步完善,有可能逐渐替代其他两种导航模式
[5]。
2.2 Iso-C臂三维导航系统在脊柱侧弯中的应用及相关注意事项 脊柱侧弯指脊柱一个或数个节段向侧方弯曲并伴有椎体旋转、前凸、后凸脊柱畸形,常常伴有肋骨和骨盆的旋转倾斜畸形及椎旁韧带、肌肉的异常
[6]。国外研究发现,低龄儿童患脊柱侧弯比例正在不断上升。随着年龄增长,患者心肺功能逐渐下降,身心健康的发展也明显受到影响,使之成为了日益严重的社会健康问题
[6]。脊柱侧弯在治疗上主要以早期发现、早期预防、早期治疗畸形为原则。
目前,治疗脊柱侧弯主要采用手术治疗方法,尤其是严重的脊柱侧弯。Iso-C臂三维导航系统具有时效性和精确性优势,引导术者以更加精确、更加安全的手术方式进行各种复杂脊柱侧弯手术,提高脊柱矫形手术的成功率。
自Boucher首先将椎弓根螺钉用于后路腰椎融合术以来,经过Harrington、Roy-Camille、Steffee等的改进和发展,椎弓根螺钉固定系统已广泛应用于临床上
[7]。椎弓根螺钉固定系统以其安全,坚强的短节段固定,可靠的三柱稳定性以及对侧弯脊柱具有很好旋转矫正力,广泛应用于各类脊柱的外科手术中,并取得良好的临床效果。特别是各种脊柱侧凸矫形手术,由于脊柱侧弯患者的椎体旋转,椎弓根变异,椎管变形等异常情况,明显增加了脊柱侧弯矫形风险。椎弓根螺钉置入位置不佳,常常导致血管神经损伤等并发症
[1,7]。相关文献报道利用C 型臂透视导航系统进行椎弓根螺钉内固定有10%-40%的置钉位置不理想
[4,8]。
Gertzbein等
[9]研究脊柱椎弓根内固定后行CT复查发现,有28%的螺钉位于椎弓根外。国内殷渠东等
[10]认为椎弓根螺钉位置和修复效果密切相关, 置钉位置不当可以造成神经根损伤、感染、脑脊液漏等并发症。近年来,随着计算机辅助导航系统在骨科领域的运用日益成熟,尤其是Iso-C臂三维导航系统的出现明显提高了椎弓根钉置入的精确性和安全性,从而降低脊柱侧弯矫形手术的风险性
[11]。
Iso-C臂三维导航应用中的注意事项:①术中应避免工具上参考基发生松动或移动,否则椎弓根螺钉轨迹在导航仪上的显示将发生误差,造成误导。②术中应避免导航参考基松动,若参考基与固定棘突发生位移, 则虚拟的解剖结构和实际解剖结构之间将产生的误差,椎弓根置钉准确率将下降。③术中正确放置导航仪,确保最佳红外线示踪信息接收效果,若前方有物体遮挡,将影响红外线接收信息效果。④红外线反射球勿沾血液或其他染色物,必须保持干净,建议红外线反射球一次性使用。因为如果反射球沾染血液或多次使用,可导致注册匹配精度下降,容易发生注册失败,影响手术时间。⑤操作应按监测仪上显示的轨迹轻柔操作, 特别是在局部脊柱操作时。
t1.jpg)