设计:单一样本观察。
时间及地点:实验于2011年9月至2012年10月在牡丹江医学院完成。
对象:选取1名健康成年男性志愿者作为测试对象,对其腰椎进行X射线扫描以排除腰椎的异常。
方法:
扫描数据:测试对象取仰卧位,使用美国GE Lightspeed16层螺旋CT机。扫描条件:选择L4-L5骨组织窗扫描,层厚1 mm,床进速度1 mm/s。
图像预处理:将获得的图像储存在与CT机相连的电脑中,见图1,转移到移动硬盘中带回。以jpg格式的文件储存在工作机中,L4-L5节段CT图像共48张。将其转移到photoshop图像处理软件中进行图像的处理,把jpg格式文件转换为bmp格式的灰度图,尺寸为512×512,见图2。由于从CT获得的图像直接从电脑上拷贝,不涉及到扫描的步骤,所以可省略在photoshop软件中图像精确对位的步骤。
.jpg)
重建数据的采集和数据转换:利用Matlab软件中的imread函数读入现有的48幅L4-L5节段CT图像。用 mat2gray函数将图像的类型由uint8转换为double.而后用cat函数将转化后的每一幅图像集中到一个三维体数据集中,并将此数据集保存为mat文件。mat 文件是一个二进制的、与平台无关的数据文件,Matlab使用其存放工作空间中的各种变量和矩阵、数组。把三维数据集保存为mat文件的好处是:由于所用到的图片多达48 幅,数据量很大,如果每次运行程序时都重新读入这些图片将很费时。若将其保存为mat文件只需在下次运行时,用load 命令将其载入即可,以达到节省时间之目的。
三维模型的构建:将三维数据集存储成ANSYS可以直接识别的命令格式,存储形式为*.dat或*.txt,其中关键点的存储形式为k、M、x、y和z,其中M为关键点的参考序号。在ANSYS有限元软件中读取MATLAB转换的文本文件,采用自底向上的方法,即从最低级图元向上构造模型,首先定义关键点,然后依次是相关的线、面、体。得到L4-L5活动节段完整有限元模型,利用有限元软件的自由网格划分功能进行网格划分,见图3。
有限元模型的单元划分:L4-5活动节段完整有限元模型共包括47 397个实体单元,598个缆单元,585个壳单元,384个目标单元,232个接触单元,总计共67 259个结点。模型包含了几何非线性、材料非线性、接触非线性3种结构非线性类型。其中椎体皮质骨用6结点三角面薄壳单元模拟,单元厚度设定为1.0 mm,椎体松质骨、终板、椎间盘纤维环、基质以及后部结构,包括椎弓根、峡部、终板、棘突、横突、小关节突以及关节软骨均由10结点四面体单元模拟。
椎间盘和髓核被模拟为不可压缩的黏弹性液体,其体积模量为1 666.70 MPa,髓核的体积占椎间盘体积的48.87%,椎间盘纤维环由基质与埋在基质中的胶原纤维所构成的混合体表示,前者由3层连续性环状体构成,纤维环纤维由8层只承受张应力的索单元构建,纤维在环状体中呈剪刀状方式走行,并与椎间盘平面成平均±30°的夹角[39]。纤维体积占纤维环总体积的19%,各层纤维的横截面积自外向内逐渐减小,纤维环纤维的弹塑性应力应变关系曲线参考文献而设 定[6-7]。
椎间盘的上下表面由1.0 mm厚的软骨终板构成,L4下终板与L5上终板凹陷角分别设为156.9°和165.6°。关节突软骨层厚0.5 mm,关节软骨层的表面接触选用面-面接触单元模拟(无摩擦的滑动表面接触单元),接触单元的初始间距为0.6 mm,摩擦因数为0。关节软骨的材料属性被处理为线弹性,其弹性模量设定10 000 MPa[8-10]。有限元模型包含的前纵,后纵,棘上,棘间,横突间韧带以及黄韧带和关节囊韧带均采用超弹性索单元模拟,单元的位置、横截面积及长度决定于各组韧带的实际解剖结构。见表1。
椎体间融合模型:将纤维环的最外层材料变为皮质骨并把内层的纤维环和髓核变为松质骨,通过这样的转换,标准模型成为椎体间融合的模型。
侧后方融合和后方融合的模型:通过向正常模型添加骨棒建立L4-L5侧后方融合和后方融合的模型,见图4。骨棒由表面的皮质骨和内部的松质骨构成。
侧后方融合模型骨棒的形状是长方体,大小为 10 mm×10 mm×51 mm,由372个皮质骨单元和228个松质骨单元构成,共计600个单元,见图4A。后方融合模型的骨棒大小和形状与侧后方融合模型的骨棒相同,由278个皮质骨单元,147个松质骨单元构成,共计425个单元组成,见图4B。
侧后方融合模型的固定位置为从L4椎体的横突到L5椎体的横突和小关节的侧方。这和临床上的应用是一样的。后方融合模型的固定位置是从L4椎体的棘突到L5椎体的棘突。
小关节融合的模型:为了模拟小关节的融合,必须将正常模型小关节空白单元区用皮质骨单元充填。
边界和载荷条件:L5椎体的下表面和下方的小关节固定不动。实验中的载荷条件是轴向压缩和屈伸活动。在L4椎体表面的中央分十步逐渐增加轴向载荷至1 000 N。在L4椎体表面分15步逐渐增加屈曲-伸展方向载荷至15 N·m。每个模型都施加轴向压缩载荷,屈曲和伸展载荷,并对结果进行比较和应力分布的分析。
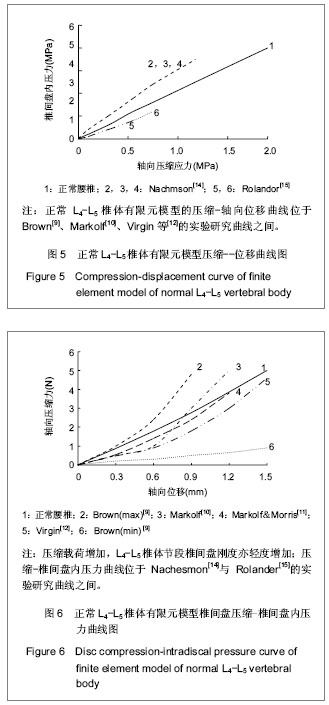
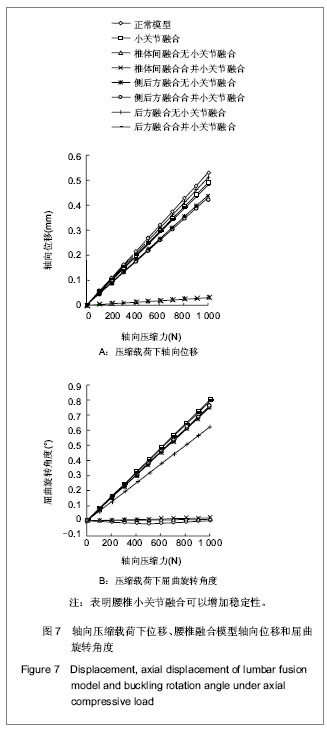
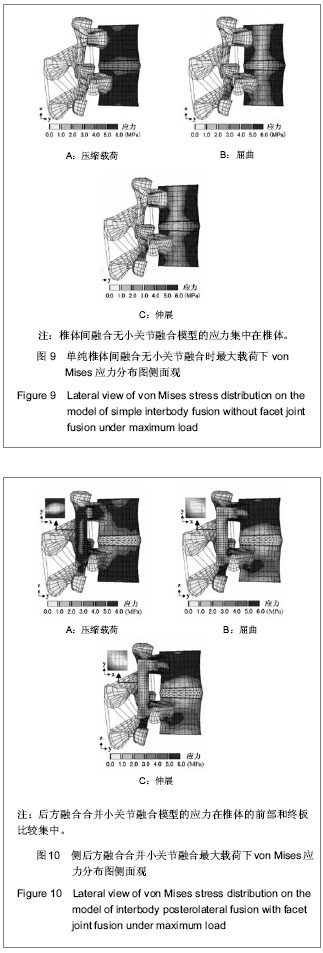
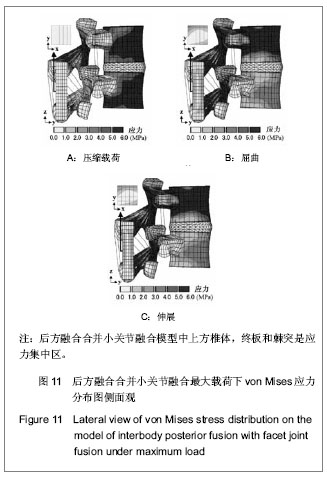
主要观察指标:①模型验证结果。②融合模型施加载荷后的变化(包括轴向压缩的变化、屈曲和伸展载荷下的运动、Von Mises应力分布)。


.jpg)
.jpg)
.jpg)