2.1 国内膝关节试验机的研究现状 中国人口众多,需要进行膝关节置换手术的人数也多,然而目前国内的人工关节技术仍处于低水平阶段,膝关节试验机主要采用进口的方式引入。针对国内膝关节试验机研究领域的不足,近几年来许多研究人员对此进行研究。
李元超等[13]采用凸轮、连杆、锥齿轮以及同步带轮机构组合形成3组机构,分别模拟膝关节的屈曲伸直、内外旋转和前后移动运动,可通过3种运动之间的组合实现较为复杂的运动状态。使用伺服电机对试样进行纵向加载,既能够模拟膝关节在人体中运动状态,也简化了结构,省去了以往试验机多个电机、传感器以及电路的结构,拆装方便,造价低。该试验机在建立3个独立传动机构实现组合运动的基础上,通过减少电机提高试验机的经济性和工艺性。
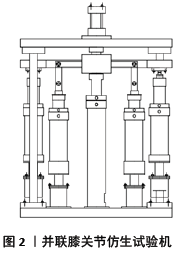
针对膝关节复杂的多自由度问题,程刚等[14]将并联机构理论引入到试验机中,如图2所示,基于并联的驱动方式具有强度高、精度大、负载能力强的特点,结合嵌有双列角接触球轴承的动平台对膝关节的运动进行更加精确的模拟。在纵向上采用液压加载方式,配有压力传感器,能够监测关节加载力的大小。采用定平台与动平台结合的方式,通过主动支链和连接支链实现精确传动和复杂动作。设有关节窝、浴液盆、球头座等,利用球心对中来固定关节试样和构建与人体生理环境类似的测试环境。该试验机还装有精度高、刚度大的滚珠丝杠传动和推力关节轴承,结构设计便于操作和控制,拆装方便,测试性能良好且稳定。
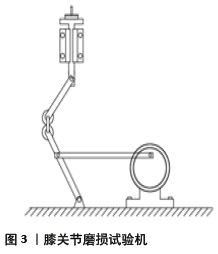
吴刚等[15]针对传统的球面接触型试验机尚不能够很好地模拟膝关节全尺寸运动的情况,选用连杆代替大腿和小腿,通过连杆机构实现运动的传递,如图3所示。大腿杆采用仿真运动装置,与加载装置相连,应用滑槽对大腿杆顶部的运动进行控制;加载装置为简易的砝码,通过放置不同的砝码改变膝关节假体受到的垂向载荷,模拟在不同人体质量下膝关节假体的摩损性能;小腿杆采用连杆驱动装置,驱动装置为电机,电机旋转带动四杆机构实现小腿杆的往复运动。为了能够模拟人体的测试环境,在大小腿杆上又加装带润滑油的软囊,保证运动的润滑条件。
许多学者都从如何更好地使膝关节试验机能够准确模拟人体的运动状态入手,但在对人体测试环境的模拟上还有所欠缺。膝关节运动过程中存在多处摩擦产生的热量[16],引起温度升高,不仅会导致膝关节假体氧化降解、松动,还会对周围的组织和关节产生影响,因而测试环境中的温度对膝关节试样的测试结果有着很大影响。
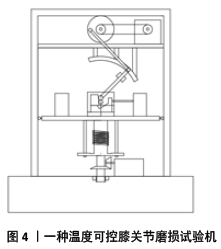
陈宇澄等[17]基于对测试环境温度的模拟和控制,设计了一种温度可控的膝关节摩擦磨损试验机,如图4。该试验机以伺服电机为驱动装置,利用下伺服电机、传动丝杠和弹簧实现柔性加载,将髌骨模拟块引入试验机中,结合夹具实现关节试样的固定。环境箱为可进行大体观察的透明亚克板,通过试样两侧的红外热像仪和温度控制装置对膝关节试验时的温度进行实时观察、记录和控制,能够更好地控制测试环境。在模拟运动状态上,设定连杆运动轨道,运用偏心轮和上伺服电机实现简单的屈伸动作。
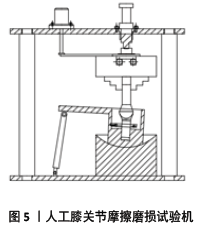
许文虎等[18]基于单轴型试验机运动情况单一以及多轴型试验机结构复杂的基础上,采用了双轴型试验机,如图5所示。一方面采用液压加载装置,电动机通过偏心轮实现扭转运动,液压杆与底座相连,实现往复运动并通过选调液压杆对往复运动进行控制;另一方面采用连杆传动,设有角接触球轴承,使柱式压力传感器不随膝关节试样运动而运动,保证测试数据采样的准确性。膝关节试样下端采用凹槽配合,溶液盆中装有润滑油,以模拟不同的测试环境。
杨绿等[19]结合目前球面接触型试验机不能反映材料的几何特性这一不足,利用齿轮组、带轮组、凸轮以及连杆等组合形成机构。伺服电机带动主动轴旋转,通过凸轮与锥轮组合作用对试样施加压力。试样的往复运动由凸轮组和锥轮组组合模拟;内外旋运动是由带轮组和直齿轮组传递驱动力带动曲柄摇杆机构实现;屈伸运动是利用上曲柄摇杆装置和滑槽机构驱动。该机构在一个伺服电机驱动的基础上完成加载和3种独立的运动,能够精确地模拟膝关节假体在人体中的运动摩擦情况,较好的反映出材料的几何特性。
范永威等[20]设计了一种可以对髋关节、膝关节和肩关节等假体材料进行磨损试验的试验机。该试验机由加载模块、销导向模块、框架模块以及运动模块组成,并设置了6个销盘磨损式工作位,可以同时全方位的对假体试样进行试验。该试验机利用销导向模块和框架模块对运动进行导向;加载装置利用弹簧伸缩来改变加载力大小;运动装置采用2个步进电机实现水平面上不同运动轨迹的控制。此外,该试验机还将数据采集卡和LABVIEW(Laboratory Virtual Instrument Engineering Workbench)程序应用到数据采集过程中,实现在线采集,提高准确度和精度。
膝关节的运动情况和力学特征复杂,仅通过简单的机构组合并不能很好地控制试验机的运动轨迹,因而无法设计可行的试验机方案。针对这个问题,王松涛等[21]利用速度椭球的原理对试验机进行优化分析,即将速度椭球引入尺度综合,求得最优参数再进行仿真检验。通过该方法优化后的试验机疲劳程度降低,可靠性和使用寿命提高。王松涛等[22]还利用超混沌序列的数学方程分析试验机运动分岔特点,以此提高试验机的运动稳定性。刘相镇等[23]利用拉格朗日方程和增广Priority-driven scheduling-PD(PD)控制策略提高试验机平台对运动轨迹跟踪和控制的精度。路林吉等[24]指出可以采用迭代系统分层学习的方法来提高运动轨迹控制的精度。
2.2 国外膝关节试验机的研究现状 国外膝关节试验机的技术比较成熟,生产制造了各种类型的膝关节试验机,其中以多轴多站试验机最为广泛。相比于简单的单轴试验机,多轴试验机可以根据各个轴从不同方向和角度施加的力与运动的总和来模仿膝关节假体在人体中的运动情况;而多站试验机能够一次性进行多个关节试样的测试,有利于膝关节假体试验的分析和比较。目前国外膝关节试验机的生产厂家主要有PROSIM、AMTI、MTS和Shore Western等。
PROSIM是典型的多轴型试验机[9],拥有6个工作位、5个独立的运动轴以及6个独立的负载轴,可以同时对位移和力进行控制,能够简便清晰地比较不同结构和材料膝关节假体的摩损性能,如图6中所示。5个独立的运动轴上都采用电机、驱动器和齿轮箱相组合的机电驱动装置,这5个轴将各个独立站衔接在一起,能够实现深度屈伸等大幅度动作和其他组合动作。每个站都有各自的负载轴和六轴称重传感器,以保证每个站相互独立。该试验机还装有虚拟弹簧,能够很好地模拟软组织在运动过程中的形变。采用简单、容易操作的Windows窗口,具有可编程性,能够实时监测和记录位置、负载等数据并对测试环境温度进行控制,灵活性和适应性强。
AMTI可以模拟出一个全速、满负荷的六自由度环境。六自由度指所有关节运动都可控制和测量,每个轴都可以在力或位置控制中工作,包括零力控制来模拟无约束轴,极大地提高了仿真的动力学和运动学真实感。AMTI独有的多纤维韧带模型可捕获6自由度软组织轴间耦合,为构建最接近人体内的测试环境提供了可能。利用联合参考虚拟轴描述了沟槽坐标系和Suntay坐标系的运动学,用户可自定义坐标,改变坐标系统的原点和方向以适应安装的试样。此外,该试验机还采用了启发式约束模型,可以向上兼容旧模拟器中使用的软组织模型,具有更大的灵活性和可编程性。
MTS提供了两种类型的膝关节试验机,即MTS Bionix单站试验机以及MTS Bionix多站试验机[13]。单站试验机借助MTS扭转试验机实现多种运动和力学加载,但每次只能试验一种膝关节假体。而多站试验机采用与单站试验机类似的运动模式和力学加载方式,无需借助扭转试验机,能一次试验多种膝关节假体。
Shore Western试验机如图7所示,采用伺服液压加载,有20个独自的液压控制通道。该试验机配备有6个独立的工作站(分为两组,每组3个),不仅有轴向载荷,还在前后移动方向模拟股骨载荷。中间/侧向和内外翻都是被动运动板,中间/侧向枢纽是可调控的,即第五自由度。每个工作台都拥有单独的温度和液体高度可控的测试环境,应用了蠕动泵和树脂旋转门以保证测试环境干净安全。采用独立的多轴传感器,能够实现工作台和轴向载荷独立的编程功能。每个工作站都能够实现轴向加载、前后移动以及内外旋等运动,但是其屈伸运动是一组3个同时运作的。用户可以自定义载荷和曲线角度,允许利用弹簧模拟软组织,可设置限定控制条件,得到试样破裂时的真实数据。
针对膝关节试验机国外许多学者对其各种性能做了研究,对膝关节试验机的材料和结构进行改进和创新,以提高膝关节试验机的测试性能。
SAIKKO等[25]设计并制作了一种具有球-面接触的三轴膝关节磨损模拟器,三轴运动包括屈曲伸直、前后移动和内外旋转运动,可用于假体膝关节材料的基本磨损和摩擦试验。ONATE等[26]针对以往研究表面处理和硬质涂层对钴铬和钛合金修复的影响时缺乏与人工关节之间相关性的问题,设计出可以滚动兼滑动的特殊摩擦试验机,用膝关节假体最不利的运动情况来研究新的聚乙烯配方、制造和加工方法。
针对球面接触型试验机,圆盘的寿命关系到试验机的使用寿命,因此许多学者针对在试验机运转下圆盘的寿命问题进行分析。
SAIKKO等[25]通过对圆盘厚度的研究得出非辐照聚乙烯对圆盘厚度不敏感,射线辐照和老化导致磨损率升高,磨损率随厚度的减小而增大。ONATE等[26]测试硬质涂层和离子注入对超高分子量聚乙烯的减磨效果,得出类金刚石(Diamond-like Carbon简称DLC)和离子注入(Co-Cr和超高分子量聚乙烯)在减少超高分子量聚乙烯磨损方面的有益作用。BAHCE等[27]研究圆盘受周期性载荷的影响及圆盘形状对圆盘磨损率改善的影响。
在膝关节试验机进行工作之前,还应对日常生活常见活动的机械性能进行量化,得出运动状态的各种参数,从而来控制和编制膝关节试验机的运行曲线。针对这个问题,GUESS等[28]利用约束模拟力,建立三维计算机模型模拟人在不同情况下膝关节的运动状态。DESJARDINS等[29]设计出一款力控动态膝关节仿真器,用来预测机械性能的大小和范围。XU等[30]研究了一种新型假肢膝关节运动平台系统,运用神经网络预测的方法以模拟假肢膝关节的随机动态过程。
2.3 膝关节试验机的结构分析
2.3.1 膝关节试验机的驱动装置 国内外膝关节试验机均采用电机作为驱动装置,但有些试验机为了提高驱动性能在电机上做了改进。一方面,为了提高膝关节试验机运动的精度和平稳性,杨绿等[19]采用伺服电机实现了对速度、位置和力矩的闭环控制,发热和噪声小,效率高;Shore Westem试验机则采用伺服液压装置,既满足了精度要求又能实现较大力矩的控制。另一方面,为了简单实现膝关节试验机运动的范围调控,PROSIM试验机利用减速器对电机转速进行变速,扩大试验机的研究范围[9]。
试验机主要以电机来驱动,结合其他设备和原理实现对电机驱动性能的优化。精确的驱动控制由伺服电机、伺服液压等实现。减速器只能实现有级的速度变化,为了能够提高试验机的真实性,电机应该能够提供无级变速。基于对膝关节假体疲劳寿命的研究,一般的电机并不能很好地实现高频率的加载。许鹏[31]提出将“零传动”的音圈直线电机作为驱动装置,实现大行程、高频率的加载。诸如音圈直线电机等能够实现高频驱动的电机,可以很好地实现对疲劳寿命的试验。结构复杂、功能强大的电机成本高,安装且维修困难,因此选择什么样的电机要依据该试验机需要实现的功能以及经济合理性来决定。
2.3.2 膝关节试验机的加载装置 膝关节在人体中起支撑作用,因而很容易磨损。人体对膝关节的压力是膝关节产生磨损的主要原因,因而选择合理的加载装置对模拟的真实性有着重要作用。最简单且经济的加载装置是吴刚等[15]研究的试验机,通过手动加砝码实现几种加载力的变化,但这种试验机模拟的加载是静态的、离散的,并不能模拟现实情况。而在试验机中最常用的加载装置还是电机、液压装置以及电液伺服等[32],实现加载力连续平稳的变化。此外,陈宇澄 等[17]在电机外装入传动丝杆和弹簧以减少冲击和振动,实现柔性加载。
在实际情况中膝关节并不是直接承受身体体质量,随着人体的姿势动作不同,受力大小其实也在变化[33],并且是非均匀连续变化的,所以使用伺服电机等进行加载下膝关节假体的磨损试验结果还存在一定的误差。
2.3.3 膝关节试验机的传动机构 膝关节试样置入人体内后,在各种运动的影响下假体材料逐渐损坏,造成膝关节假体松动。基于提高膝关节试验机试验准确性和多功能性的要求,国内外学者采用多种不同的传动方法,最常见的是用动力轴组合运动的方式。PROSIM试验机采用5个运动轴相互配合,实现各种运动[9]。SAIKKO等[25]只采用了3个轴实现简单的膝关节运动。可以看出,轴的数目越多试验机能实现的运动种类也就越多,但成本也会越高、结构也更加复杂、维修更加困难,可靠性降低。
相比于动力轴组合的方式而言,连杆机构的成本不高、结构简单、便于控制运动轨迹,适用于对简单运动下膝关节假体的特性进行研究。吴刚等[15]采用凸轮和连杆相结合的方式实现单一、周期性的屈伸运动。陈宇澄等[17]采用轨道连杆机构固定膝关节的运行轨迹,虽然增加了运动的可靠性,但使得膝关节的运动缺乏灵活性和通用性。
此外,加强膝关节试验机运动轨迹的控制及提高其精确度,能够改善试验机的测试准确性。程刚等[14]将并联机构设计到试验机中,运用嵌有双列角接触球轴承的动平台对膝关节运动轨迹进行精确控制。杨绿等[19]利用凸轮、带轮、齿轮组合形成传动装置,运动定位精确,速度可靠。
2.3.4 膝关节试验机的测试环境 膝关节试样的损坏也与膝关节试样所在的环境有关,人体内的液体环境会加速假体的溶解,造成假体松弛等问题。在设计试验机时对假体环境的设计是一个不可或缺的环节。
关节腔内存在着由水和大量营养物质组成的关节滑液,有滋养关节、排出代谢产物的作用。滑液的黏稠程度影响关节的磨损,是用于诊断关节炎的主要手段。目前已经设计出的试验机通常会将润滑液放在摩擦表面上,创造适宜的测试环境。
滑液的黏稠程度受温度影响比较大,温度越低黏稠程度越大。国内外学者针对润滑液温度的控制设计出了一些方案。Shore Westem试验机中润滑液的温度、液面都是可以监控的,既减少润滑油温度变化对试验结果的影响,也可保证设备安全。在此基础上,陈宇澄等[17]设置热敏感器和温控装置对温度进行实时记录和控制,可用于研究不同温度下的磨损情况。
基于因软骨张力不足导致关节松动的问题[31],PROSIM试验机采用虚拟弹簧模拟软组织受力情况,考察软组织对膝关节假体的影响,使试验机模拟更加精确[9]。
2.3.5 膝关节试验机的测试技术 聚乙烯材料的磨损主要源于接触表面的接触面积和接触应力,目前采用接触应力感应片对接触面积和接触应力进行测量[7],但精确度和可靠性并不高。贾玉梅等[35]利用超声场对试验得到的磨屑进行分析,研究人工关节磨损的性能。
在分析测量数据的时,试验机可以利用有限元软件等方式进行模拟分析[31]。徐高伟等[34]便是利用了有限元分析对9种模型进行优化处理,研究假体定位参数对全膝关节置换手术的影响。赵志昕等[7]通过有限元方法建立膝关节胫骨基座的虚拟平台,便于快速高效地研究膝关节的力学性能。周鑫源[36]通过建立力学模型,利用联合仿真平台进行模拟,研究膝关节角度与应力的变化曲线。陈凯[37]通过建立力学模型,借助有限元分析的方法分析仿生关节软骨的摩擦问题。陈岚等[38]利用高速数字处理器对数据进行收集并通过LABVIEW软件进行直观准确的测量与反馈。
膝关节试验机测试得到的数据可以借助其他数学的方法或者仿真平台进行研究分析,精准高效地实现对膝关节试样的研究。
2.3.6 膝关节试验机的操作方法 膝关节试验机是给研究膝关节假体性能的研究人员使用的,因而试验机的操作方式应该简单易懂、灵活多变。最简单的控制方式便是直接利用按钮进行起停,但对于功能繁多的试验机来说并不适用。除了基本起停外,还可以通过调节电机来调节膝关节试样的运动状态。略微复杂的试验机可以利用控制面板对试验机进行控制,操作方便易懂。PROSIM试验机则采用用户系统编程的方式自定义运动的轨迹,虽然灵活性更高,但操作也相对困难了许多[9]。
利用按钮进行操作适用面小,但由于其价格低廉,适合在运动形式单一的试验机中使用。编程式的操作方式更适合于运动轨迹复杂的试验机,通过编程的方法能够自定义轨迹,研究在特定状态下的膝关节假体的磨损情况。此外,还可以对测试软件进行模块化设计[39],便于用户快速掌握和操作。