1.1 设计 有限元仿真分析。
1.2 时间及地点 实验于2020年4-9月在北京信息科技大学与国家康复辅具研究中心附属康复医院完成。
1.3 材料 随机选取1例52岁中老年膝内翻下肢畸形男性患者完善的手术前后膝关节X射线片、三维CT重建及MRI检查资料,通过CT数据进行膝关节骨性结构几何建模,通过MRI资料进行膝关节软组织建模,生成完整3D膝关节模型。以秦泗河矫形外科团队股骨髁上截骨术的经验数据为指导在3D膝关节模型上进行受力仿真,通过有限元分析仿真得到截骨前后相应的生物力学指标,研究矫形前后膝关节面应力的分布情况。患者对实验知情并同意实验。
1.4 实验方法
1.4.1 膝关节形态建模 膝关节主要包括股骨、胫骨、髌骨、腓骨、半月板及关节韧带[1]。股骨、胫骨、髌骨、腓骨等骨骼基于图像分割法进行三维模型重建。
图像分割是将图像分为若干具有特殊性质的区域,并引出所针对目标的过程。医学图像分割方法主要包括边缘检测法、阈值法、区域法及基于特定理论的分割方法[10]。Mimics软件基于阈值分割图像方法,实现对医学图像的识别并分割所需要的目标图像,以建立所需的三维模型。在此谨基于阈值分割方法建立骨类的三维模型。
阈值分割法即灰度阈值法,通过阈值的设定做出输入图像到输出图像的变换。基于阈值法的图像分割,高效迅捷,被广泛应用于图像元素与背景元素灰度值差异较大的图像中[10-11]。
基于手术前后膝关节的CT数据,建立股骨、胫骨、髌骨和腓骨模型,由于CT数据采集误差、设备误差及软件局限性,仅依靠自动分割并不能将所需要的模型图像全部包含在内[11],所以在此先基于自动分割对骨类图像粗分割,后续采取交互式手动分割修补各图层的图像中缺失的部分,删除图像中多余的杂点,从而使模型达到预期效果。
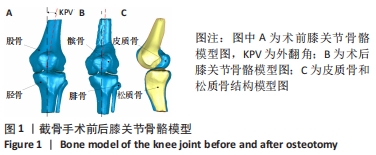
各图层的图像处理完毕后,初步建立各部分骨骼的三维模型,该模型在视觉效果上尤显粗糙,特需通过对模型最小细节、间隙闭合距离、平滑因子、迭代系数等参数的设置完成对模型的后处理及光滑操作。最小细节过小会加大模型的运算,最小细节过大会降低模型的真实性,增大模型的误差;平滑因子的设置影响模型的光滑程度,平滑因子越大,模型视觉效果越佳;迭代系数即为迭代的次数,迭代思想为逐次逼近,在一个粗糙近似值的基础上逐渐接近真实值,迭代次数越多模型越真实[12]。针对病患状态的个性化,结合人为干预调整模型参数,避免模型的孔洞和点云不连续的情况,提升模型质量。为网格划分时便于选取模型及仿真时易于对模型材料属性的设置,在此将膝关节划分为上、下两部分分别建立三维模型,膝关节各骨骼结构三维模型如图1所示。医学上一般以5°-7°为膝关节生理外翻角的正常值,图1A中术前外翻角值较正常值相比较大,图1B中术后外翻角值接近正常值。
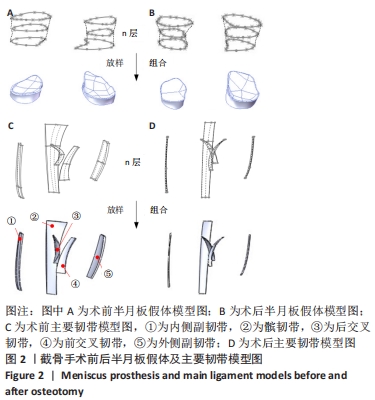
该文的创新点为基于轮廓延展思维建立半月板假体和基于MRI数据作出标记点,再以轮廓延展的方式建立主要韧带。轮廓延展是应用放样及组合实现对膝关节假体模型的建立。放样为轮廓曲线通过指定的路径延伸到另一个截面,即以一条引导线将轮廓曲线过渡到另一个截面生成特征;组合是利用添加、删减或共同多个实体来创建单一的实体,在此通过删减组合删除假体模型与股骨及胫骨的重合部分。基于MRI数据作出的标记点是在韧带所连接的骨骼模型上以凸起或凹陷的方式将每条韧带的起止点标记,后续应用轮廓延展方法建立主要韧带模型。
基于轮廓延展建立半月板假体时,参考CT和MRI的主要数据,确定了半月板假体的位置、结构等,以建立的股骨和胫骨为基础,分别在股骨远端、胫骨近端及股骨胫骨间建立多个基准面,应用Autotrace插件自动跟踪多个基准面上的骨骼轮廓,通过参数调整实现轮廓线与截面图像的拟合,自动绘制截面轮廓,后续应用放样、组合功能,建立假体模型。术前半月板假体表面积为2 495.03 mm2、体积为2 123.31 mm3;术后假体表面积为2 694.57 mm2、体积为2 748.07 mm3。区别于基于图像扫描建立膝关节[13],该方法减少了实物扫描方法建立软组织时因模型修复、表面优化等原因导致的误差,实现模型与模型间的直接贴合,为生物建模方向介绍一种可供参考的思路。
韧带为连接2块或2块以上骨骼的条带状或片状粗纤组织。韧带可以维持关节的稳定,防止运动过程中的过伸、过屈和内外翻。膝关节韧带主要有髌韧带、前交叉韧带、后交叉韧带、外侧副韧带和内侧副韧带[14] 。韧带的建模方法常见于基于图像的逆向建模,由于软件的局限性、图像识别不清晰等原因,韧带建立的步骤繁琐、效率低下。因此基于MRI数据,在韧带相连的骨骼上标记各主要韧带的起止点位置,以建立的股骨、胫骨、髌骨和腓骨模型为基础,参考半月板假体建模方法,建立多层基准面,分别基于韧带所连接的两块骨及韧带起止点,建立膝关节部位的主要韧带,见图2。
1.4.2 膝关节有限元处理 膝关节各结构均为不规则模型,不规则模型增加了仿真时的算法复杂度,则需要对模型进行优化,通过修补模型孔洞去除特征、优化高度折射边、简化多边形、去除钉状物等操作,实现模型的初步优化;后续精确模型的曲面,曲面化模型,设置几何图形类型及相关参数设置,通过此操作实现了对膝关节模型的优化。
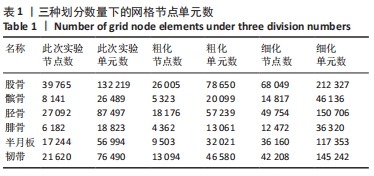
网格划分在有限元仿真中起到关键作用,网格质量及网格形式影响计算精度及计算规模,网格数量越高则计算精度越高,同时增加了计算规模,运算量变大,则需要分别对模型进行网格划分[15]。对于需要计算应力的结构,应增加其网格密度;而对于仅考虑形变的结构,则应用划分过程相对简单的网格单元并减少其网格数量,以便节省模型分析计算的时间。
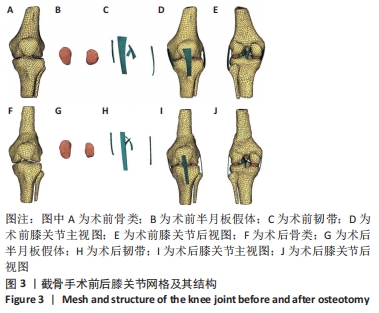
网格单元类型包括三棱柱、四面体、楔形体、六面体。膝关节模型中仅用四面体单元和六面体单元网格。四面体网格的单元函数简单、结构自由度少、计算精度低,因此节省划分网格的工作量。六面体网格在计算精度、变形特征及抗畸变程度都比四面体网格具有明显优势,但划分过程相对复杂,合理的网格划分可以在保证计算精度的前提下缩短计算时间。因此,四面体网格运用于计算精度要求相对较低的韧带,降低了计算成本,同时便于模型细节的特征保留。六面体网格运用于计算精度要求较高的股骨、胫骨、髌骨、腓骨及假体部位,六面体类型单元积分点多,进行计算时更容易收敛[16]。绘制的手术前后膝关节各结构网格模型及膝关节总模型,如图3所示。
1.4.3 有限元仿真分析 对膝关节模型进行有限元仿真分析,模拟人体在站立情况下膝关节的受力情况。
定义材料属性:①骨类结构:皮质骨,各向同性、连续的弹性材料;弹性模量为13 500 MPa,泊松比为0.3[17]。松质骨,各向同性、连续的弹性材料;弹性模量为110 MPa,泊松比为0.2[18]。②半月板假体机构:各向同性、连续、均质的弹性材料;弹性模量为55 MPa,泊松比为0.5[17]。③韧带结构:各向同性、非线性超弹性材料,结构定义仅受拉伸(牵张),无压缩[19]。髌韧带设置剪切模量为225 MPa,泊松比为0.3;内外侧副韧带剪切模量为60 MPa,泊松比为0.3;前后交叉韧带剪切模量为200 MPa,泊松比为0.3。
相互作用设置:股骨髁各部分之间存在一定的相互关系,其中股骨与胫骨间通过内侧副韧带、前交叉韧带及后交叉韧带连接;股骨与腓骨间通过外侧副韧带相连;髌骨与胫骨通过髌韧带相连,髌骨与股骨通过绑定约束代替股四头肌肌腱,因此需对其接触面、接触方式、接触作用属性及滑移公式进行设定。以面与面接触方式对各部分间接触面集合进行定义,滑移公式为有限滑移,并设定接触面间的摩擦系数为0.05。
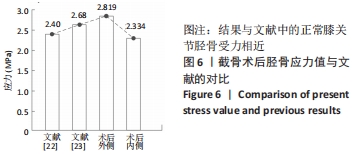
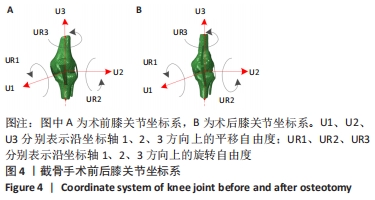
边界条件及载荷的设置:载荷是仿真的关键,是对模型受力的模拟。以三点法建立新的坐标系,选取股骨上轴线的中心点、胫骨底端轴线的中心点及胫骨底端的任意点建立直角坐标系,图4A为术前膝关节坐标系,图4B为术后膝关节坐标系,以股骨上轴线的中心点与胫骨底端轴线的中心点的连线作为3轴,模拟人体下肢力线方向。选中股骨上表面,以新建立坐标系为基准,施加3轴负方向的压力模拟人体站立状态膝关节的受力情况[20],参考文献[22-23]以同等工况施加1 000 N载荷。
边界条件是模型仿真分析准确性的前提,通过模型自由度的设置实现对模型边界条件的限定。以新建立的直角坐标系为基准进行以下自由度的设置。
股骨、髌骨自由度的设置:
U1=U2=UR1=UR2=UR3=0,U3=1 (即在3轴方向上可以移动,其他5个自由度为0)。
半月板假体自由度的设置:
U1=U2=UR1=UR2=UR3=0,U3=1 (即在3轴方向上可以移动,其他5个自由度为0)。
胫骨、腓骨自由度的设置:
①胫骨、腓骨底端:U1=U2=UR1=UR2=UR3=0;②其他部
分:U1=U2=UR1=UR2=UR3=0,U3=1。
膝关节各韧带起止点与对应骨骼应用绑定约束[21]。
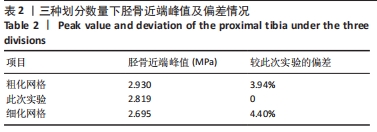
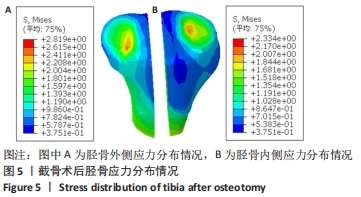
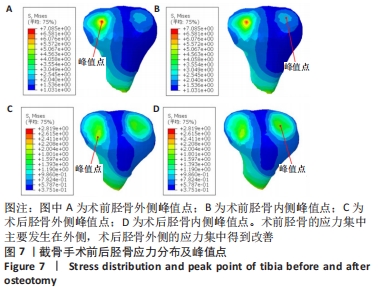
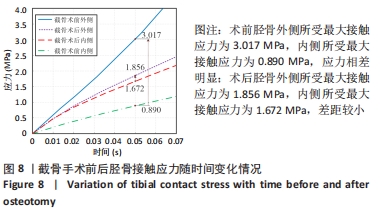
1.5 主要观察指标 手术前后胫骨内外侧应力集中情况、应力峰值、胫骨接触应力随时间变化情况。