1.1 设计 三维有限元模拟分析。
1.2 时间及地点 试验于2020年11月至2021年9月在上海工程技术大学人体工效与功能服装实验室完成。
1.3 对象 选取一名健康男性志愿者的影像资料,年龄24岁,身高173 cm,体质量64 kg,通过病史询问及CT扫描诊断,无足踝损伤及畸形。受试者对试验知情同意。
1.4 材料
实验设备:螺旋CT成像设备(联影uCT760)由上海第一人民医院影像科提供。惠普工作站(HP Z4 G4 Workstation,CPU:Intel(R) Core(TM) i9-10900X,内存:64 GB,显卡:NVIDIA Quadro P4000 8 GB,操作系统:Windows 10 64 位专业版)由上海工程技术大学人体工效与功能服装实验室提供。数字式织物厚度仪(YG141D型)、电子天平(LE104E)、动态热机械分析仪(DMA850)、多功能电子织物强力机(YG026D 型)、足底压力跑台测试系统(DIERS pedogait)由上海工程技术大学纺织服装学院提供。
足踝三维有限元模型建立所用软件:医用图像与三维重建软件MIMICS 21.0(Materialise公司,比利时),逆向工程软件Geomagic Studio 2012 (Geomagic公司,美国),三维建模软件SOLIDWORKS 2020 (Dassault Systemes公司,美国),有限元分析软件ANSYS Workbench 2020 (ANSYS公司,美国)。
1.5 方法
1.5.1 CT图像扫描 受试者呈仰卧姿势,使足踝保持中立位。扫描范围包括从足底至足踝所有的骨骼及软组织。螺旋扫描参数为:螺旋层厚0.625 mm,间距0.8 mm,分辨率为512×512像素,最终得到335张断层扫描图像,将数据以DICOM格式储存至可读写光盘。
1.5.2 三维模型构建 将DICOM格式的CT数据导入MIMICS 21.0软件,通过convert运算将图像自动生成矢状面、冠状面和水平面的连续断层图像。设置不同的灰度阈值,对图像进行分割,将骨骼边缘提取出来,对于骨骼之间阈值分割难以清晰识别的部分,采用手动划分的方式,结合单层编辑和多层编辑工具,对每一块骨骼的边界轮廓进行勾勒提取,并对空腔进行填补。图像分割完成后,通过calculate 3D功能,将所有骨骼和足踝软组织生成三维壳体模型,使用smooth工具对表面进行适当平滑,以stl格式分别导出。
在Geomagic Studio 2012软件中,进行骨骼和软组织轮廓的曲面重构,生成三维实体模型,并利用抽壳工具和布尔工具构建关节软骨和足踝主要韧带的三维实体模型。考虑到足踝的运动规律以及模拟计算的效率,将14块趾骨及2块籽骨分别融合成为第一到第五跖骨,共生成胫骨远端、腓骨远端、距骨、跟骨、舟状骨、骰骨、3块楔状骨、5块跖骨、5块趾骨共19块骨骼,距腓前韧带、跟腓韧带、距腓后韧带、胫距前韧带、胫距后韧带、胫舟韧带以及胫跟韧带共7条韧带、19块关节软骨以及包覆它们的软组织,分别以stp格式导出。
将整体模型导入SOLIDWORKS 2020进行装配,以x_t格式导出足踝装配体模型。
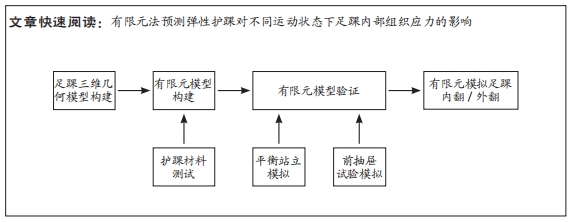
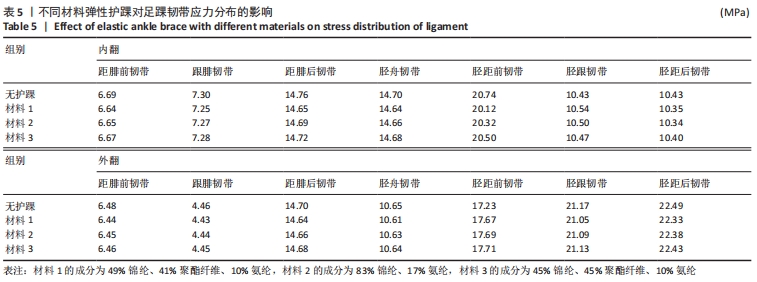
将装配体模型导入ANSYS Workbench 2020软件,利用Space claim模块基于软组织外轮廓构建弹性护踝的几何形态,同时建立一块平板以模拟地面:20 cm×30 cm×5 cm(长、宽、厚度)。并且以杆单元构建除去外侧副韧带和内侧三角韧带以外的其余韧带,依据人体解剖学数据,在骨骼上选取韧带及肌腱的起止位置,以杆单元进行连接,共生成韧带和肌腱68条。完整足踝-护踝有限元模型见图1所示。
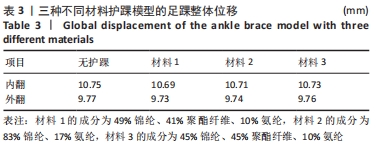
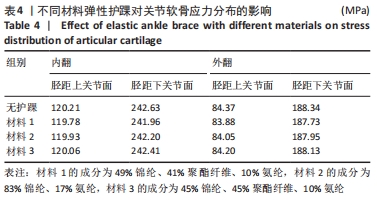
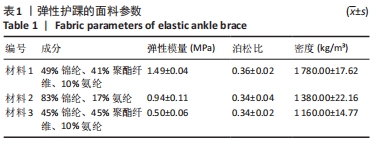
1.5.3 弹性护踝材料测试 研究所使用的材料为弹性护踝常用的复合面料,通过预实验挑选出具有力学参数差异的3种,分别记为材料1、材料2和材料3。利用YG141D型数字式织物厚度仪,测量材料的织物厚度,利用电子天平称量面积为3 cm×3 cm织物的质量,通过物理计算,即密度为质量与体积之比,分别求得3种护踝材料的密度值;利用DMA850动态热机械分析仪来对面料试样的弹性模量进行测试,选择薄膜拉伸夹具,将拉伸速率设置为100 mm/min,根据应力和应变计算其弹性模量,用最小二乘法将数据拟合为应力-应变直线,计算出其相关系数若大于0.97,则认为该直线的斜率即为弹性模量;利用 YG026D 型多功能电子织物强力机,拉伸速度设定为 100 mm/min,定伸长为15%,分别测量拉伸后的横向和轴向应变值,其比值计算得到泊松比。每种试样测量3次,取平均值。面料参数见表1所示。
1.5.4 足底压力测试 足底压力测试是验证足踝有限元模型有效性的重要途径。此次研究使用动态足底压力跑台(DIERS Pedoscan系统)进行测量,试验受试者为提供足踝CT图像拍摄者。测量时选择静态测量模式,受试者赤脚平衡站立,双臂自然垂下,一组测试读取2 min,共测量3组。
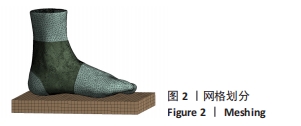
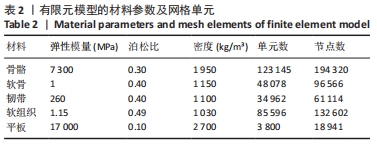
1.5.5 网格划分及材料赋值 在ANSYS Workbench 的mesh模块对完整足踝-护踝有限元模型进行网格划分。在此次研究中,骨骼、关节软骨、软组织和韧带等部分都是不规则的曲面实体,护踝可近似考虑为壳体,采用四面体单元进行网格划分;地面平板形状规则、均匀,采用六面体单元进行网格划分,见图2。
由于生物组织十分复杂的物理结构和化学组成造成了其力学性能的复杂性,考虑到计算效率,此次研究对于足踝的各组织做出一定的简化和假设,将骨骼、关节软骨、韧带以及包覆它们的软组织均视为均质的、各向同性的线弹性材料,人体模型的各材料参数由已发表的文献获得[13],见表2。
1.5.6 约束与载荷
双足平衡状态模拟:模拟体质量为64 kg的受试者赤足平衡站立,与足底压力试验所测结果对比,验证足踝有限元模型接触有效性。ANASYS Workbench提供了可高效建立接触对的工具,将接触容差设为1.5 mm,软件便可以探测并捕捉此范围内的所有接触对,在此基础上进一步定义接触设置,将足踝有限元模型的骨骼与软组织内表面、关节软骨、骨骼和韧带之间的接触关系设为绑定,相邻骨骼之间设为无摩擦接触,允许其有自由的相对运动,关节面之间考虑到组织润滑液的存在,也设为无摩擦接触。将护踝模型抑制,足底与地面平板之间的关系定义为摩擦系数为0.6的有摩擦接触。将胫骨、腓骨远端的上表面以及软组织的上表面设为固定,在平板底面施加垂直向上加载的320 N的力作为平衡站立时单足承受的体质量一半的地面反作用力,限制平板在X和Y方向上的位移,只允许其在垂直方向自由移动,同时在跟骨上施加160 N垂直向上的力,以模拟平衡站立状态的跟腱拉力。
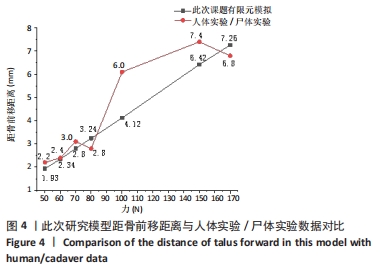
前抽屉试验模拟:足踝有限元模型的接触关系设置与双足平衡状态模拟一致,同时将护踝和地面平板设为抑制状态。前抽屉试验是用于检查足踝韧带松弛度的重要方法之一,临床上主要用于诊断和评价踝关节韧带的健康状况,在有限元法在足踝生物力学的应用方面,前抽屉试验的模拟被用来验证所构建的足踝韧带的生物力学有效性。考虑到韧带的应力和运动学参数是此次研究观察指标之一,故采用前抽屉试验对所构建的足踝韧带进行有效性验证。模拟中对跟骨分别施加50,60,70,80,100,150,170 N的前向拉力,获得不同牵引力下的距骨前移距离,通过与前人实验结果和模拟结果的对比,来判断模型是否可靠。
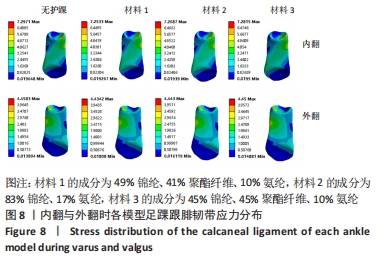
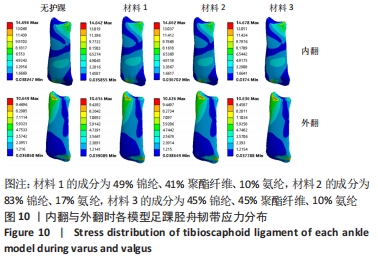
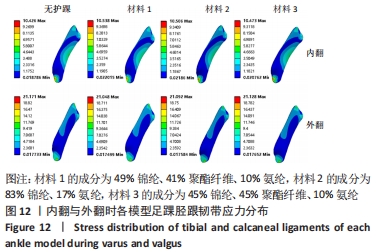
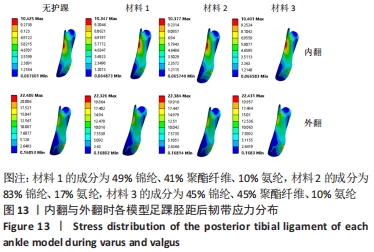
足踝内翻/外翻模拟:由于足踝位置结构众多,运动机制复杂,对其施加载荷模拟动作也非常复杂。足部的动作类型按照旋转轴的不同可分为内翻/外翻、内旋/外旋和跖伸/背屈。此次研究基于足踝运动损伤机制,选择内翻、外翻两种运动状态进行观察,利用足踝-护踝有限元模型进行不同运动状态的模拟。①内翻:将胫骨、腓骨以及软组织的近端设为固定,对平板底部施加320 N的力,模拟人体单足承受体质量一半的力,同时对跟骨施加沿Y轴方向的10 N·m的扭矩,模拟负重状态下的足踝内翻。②外翻:将胫骨、腓骨以及软组织的近端设为固定,对平板底部施加320 N的力,模拟人体单足承受体质量一半的力,同时对跟骨施加沿Y轴方向的-10 N·m的扭矩,模拟负重状态下的足踝外翻。
1.6 主要观察指标 双足平衡状态、前抽屉试验及足踝内翻/外翻模拟结果。