[1] 励建安,陈立典.新年新机遇,共绘康复梦[J].中国康复医学杂志,2025,40(1):1-4.
[2] 马骏.中国人口老龄化及其政策应对研究[M].南京:南京大学出版社,2023:321.
[3] ZHOU M, WANG H, ZENG X, et al. Mortality, morbidity, and risk factors in China and its provinces, 1990-2017: a systematic analysis for the Global Burden of Disease Study 2017. Lancet. 2019;394(10204):1145-1158.
[4] ZHANG Y, KONG D, SHI Y, et al. Recent progress on underwater soft robots: adhesion, grabbing, actuating, and sensing. Front Bioeng Biotechnol. 2023;11:1196922.
[5] ZHOU Z, LIANG B, HUANG G, et al. Individualized Gait Generation for Rehabilitation Robots Based on Recurrent Neural Networks. IEEE Trans Neural Syst Rehabil Eng. 2021;29:273-281.
[6] ZHANG L, XING S, YIN H, et al. Skin-inspired, sensory robots for electronic implants. Nat Commun. 2024;15(1):4777.
[7] HOU Z, WANG W, SU S, et al. Bibliometric and Visualization Analysis of Biomechanical Research on Lumbar Intervertebral Disc. J Pain Res. 2023; 16:3441-3462.
[8] YANG Z, FAN Z, WANG D, et al. Bibliometric and visualization analysis of stem cell therapy for meniscal regeneration from 2012 to 2022. Front Bioeng Biotechnol. 2023;11:1107209.
[9] HUANG P, FENG Z, SHU X, et al. A bibliometric and visual analysis of publications on artificial intelligence in colorectal cancer (2002-2022). Front Oncol. 2023;13:1077539.
[10] DESAI N, VERAS L, GOSAIN A. Using Bradford’s law of scattering to identify the core journals of pediatric surgery. J Surg Res. 2018;229:90-95.
[11] TANG F, JIANG C, CHEN J, et al. Global hotspots and trends in Myofascial Pain Syndrome research from 1956 to 2022: A bibliometric analysis. Medicine (Baltimore). 2023;102(12):e33347.
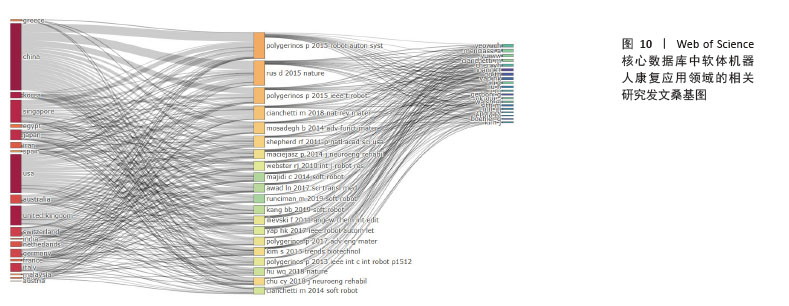
[12] GLOVER RE, AL-HABOUBI M, PETTICREW MP, et al. Sankey diagrams can clarify ‘evidence attrition’: A systematic review and meta-analysis of the effectiveness of rapid diagnostic tests for antimicrobial resistance. J Clin Epidemiol. 2022;144:173-184.
[13] POLYGERINOS P, WANG Z, GALLOWAY KC, et al. Soft robotic glove for combined assistance and at-home rehabilitation. Rob Auton Syst. 2015;73: 135-143.
[14] RUS D, TOLLEY MT. Design, fabrication and control of soft robots. Nature. 2015; 521(7553):467-475.
[15] ZHANG G, SONG J, FENG Z, et al. Artificial intelligence applicated in gastric cancer: A bibliometric and visual analysis via CiteSpace. Front Oncol. 2023;12:1075974.
[16] 章琦,李宝珍,郑雪梅,等.2000—2020年中国多重耐药菌研究热点的可视化分析[J].中国全科医学,2022,25(24):2960-2964.
[17] WU J, WANG Y, CHENG Y, et al. Comprehensive landscape and future perspectives of non-coding RNAs in esophageal squamous cell carcinoma, a bibliometric analysis from 2008 to 2023. Pathol Oncol Res. 2024;30:1611595.
[18] 王成军,亓杨杰.软体机器人在医学领域的应用[J].中国医学物理学杂志,2022,39(7):898-906.
[19] 吴苡婷.让瘫痪者再次站立和行走[N].上海科技报,2025-03-07(001).
[20] SOUZA LBO, SANTOS MRN, GARCIA RP, et al. Characterization of an austenitic stainless steel preform deposited by wire arc additive manufacturing. Int J Adv Manuf Technol. 2022; 123(9):3673-3686.
[21] HAGHI B, AFLALO T, KELLIS S, et al. Enhanced control of a brain-computer interface by tetraplegic participants via neural-network-mediated feature extraction. Nat Biomed Eng. 2024. doi: 10.1038/s41551-024-01297-1.
[22] 赵宇豪,赵慧,谭代彬.软体机器人流体驱动方式综述[J].液压与气动,2021,45(4):135-145.
[23] 李笑,李亚鹏.形状记忆合金驱动的人工逼尿肌系统[J].华南理工大学学报(自然科学版), 2024,52(6):73-80.
[24] RAHMAN MH, WERTH H, GOLDMAN A, et al. Recent progress on electroactive polymers: Synthesis, properties and applications. Ceramics. 2021;4(3):516-541.
[25] ARMANINI C, BOYER F, MATHEW AT, et al. Soft robots modeling: A structured overview. IEEE Trans Robot. 2023;39(3):1728-1748.
[26] HANNAN MW, WALKER ID. Kinematics and the implementation of an elephant’s trunk manipulator and other continuum style robots. J Robot Syst. 2003;20(2):45-63.
[27] MAHL T, HILDEBRANDT A, SAWODNY O. A variable curvature continuum kinematics for kinematic control of the bionic handling assistant. IEEE Trans Robot. 2014;30(4):935-949.
[28] HABER HE, KANE GL. The search for supersymmetry: probing physics beyond the standard model. Phys Rep. 1985;117(2-4):75-263.
[29] O’REILLY OM. Modeling nonlinear problems in the mechanics of strings and rods Cham: Springer International Publishing, 2017.
[30] QIU Z, ZHANG S, XUE Y, et al. An empirical model of soft bellows actuator. Sci Rep. 2024;14(1):28681.
[31] SHI C, LIU Z, TIAN Z, et al. Fabrication of 3D MXene@ graphene hydrogel with high ion accessibility via Al-induced self-assembly and reduction for high-performance supercapacitors. Electrochim Acta. 2023;464:142892.
[32] XIN C, REN Z, ZHANG L, et al. Light-triggered multi-joint microactuator fabricated by two-in-one femtosecond laser writing. Nat Commun. 2023;14(1):4273.
[33] SHI X, YANG L, LI S, et al. Magnetic-field-driven switchable adhesion of NdFeB/PDMS composite with gecko-like surface. Nano Res. 2023;16(5):6840-6848.
[34] GAO Z, WANG Y, MAO X, et al. Polydopamine/Carbon Black/Carbon Nanofiber/Thermoplastic Polyurethane Composite Nanofiber Strain Sensor with Ultrahigh Loading Rate for Human Activity Monitoring. ACS Appl Nano Mater. 2024; 7(10):11690-11703.
[35] ABOLHOSEN AMR, LEE S, FUKUDA K, et al. Functional soft robotic composites based on organic photovoltaic and dielectric elastomer actuator. Sci Rep. 2024;14(1):9953.
[36] LEE KH, FU DKC, LEONG MCW, et al. Nonparametric Online Learning Control for Soft Continuum Robot: An Enabling Technique for Effective Endoscopic Navigation. Soft Robot. 2017; 4(4):324-337.
[37] CHEN T, YANG X, ZHANG B, et al. Scale-inspired programmable robotic structures with concurrent shape morphing and stiffness variation. Sci Robot. 2024;9(92):eadl0307.
[38] GAFFORD J, DING Y, HARRIS A, et al. Shape deposition manufacturing of a soft, atraumatic, and deployable surgical grasper. J Mech Robot. 2015;7(2):021006.
[39] LOW JH, DELGADO-MARTINEZ I, YEOW CH. Customizable soft pneumatic chamber–gripper devices for delicate surgical manipulation. J Med Device. 2014;8(4):044504.
[40] CHEN X, CHEN H, ZHU L, et al. Nanoparticle-Patch System for Localized, Effective, and Sustained miRNA Administration into Infarcted Myocardium to Alleviate Myocardial Ischemia-Reperfusion Injury. ACS Nano. 2024. doi: 10.1021/acsnano.3c08811.
[41] CHEN J, JIN D, WANG Q, et al. Programming ferromagnetic soft materials for miniature soft robots: Design, fabrication, and applications. J Mate Sci Technol. 2025;219:271-287.
[42] LIU Y, HUANG J, LIU C, et al. Soft Millirobot Capable of Switching Motion Modes on the Fly for Targeted Drug Delivery in the Oviduct. ACS Nano. 2024;18(12):8694-8705.
[43] HAO B, WANG X, DONG Y, et al. Focused ultrasound enables selective actuation and Newton-level force output of untethered soft robots. Nat Commun. 2024;15(1):5197.
[44] SUI M, OUYANG Y, JIN H, et al. A soft-packaged and portable rehabilitation glove capable of closed-loop fine motor skills. Nat Mach Intell. 2023;5(10):1149-1160.
[45] HUANG J, TU X, HE J. Design and evaluation of the RUPERT wearable upper extremity exoskeleton robot for clinical and in-home therapies. IEEE Trans Syst Man Cybern Syst. 2015;46(7):926-935.
[46] DI LALLO A, YU S, SLIGHTAM JE, et al. Untethered Fluidic Engine for High‐Force Soft Wearable Robots. Adv Intell Syst. 2024;6(11):2400171. |