Chinese Journal of Tissue Engineering Research ›› 2020, Vol. 24 ›› Issue (9): 1416-1421.doi: 10.3969/j.issn.2095-4344.2513
Previous Articles Next Articles
Application of robot in orthopedic surgery: reliability and room for improvement
Cao Xuhan1, Bai Zixing1, Sun Chengyi2, Li Yanle1, Sun Weidong1
- 1Second Department of Bone and Joint, Wangjing Hospital of China Academy of Chinese Medical Sciences, Beijing 101002, China; 2Beijing University of Chinese Medicine, Beijing 100029, China
-
Received:2019-08-01Revised:2019-08-03Accepted:2019-09-07Online:2020-03-28Published:2020-02-13 -
Contact:Sun Weidong, Chief physician, Second Department of Bone and Joint, Wangjing Hospital of China Academy of Chinese Medical Sciences, Beijing 101002, China -
About author:Cao Xuhan, Master candidate, Second Department of Bone and Joint, Wangjing Hospital of China Academy of Chinese Medical Sciences, Beijing 101002, China -
Supported by:the National Natural Science Foundation of China, No. 81273984; the Natural Science Foundation of Beijing, No. 7172244
CLC Number:
Cite this article
Cao Xuhan, Bai Zixing, Sun Chengyi, Li Yanle, Sun Weidong. Application of robot in orthopedic surgery: reliability and room for improvement[J]. Chinese Journal of Tissue Engineering Research, 2020, 24(9): 1416-1421.
share this article

2.1 骨科手术机器人主要构成 骨科手术机器人主要包括3部分:机械系统、影像系统、计算机系统[6],见图2。规划导航定位机构一般是由测量仪器、传感器、定位仪等计算机软件构成;手术执行机构主要依靠机械系统相关运动单元。建模与规划阶段主要依靠影像系统完成图像的采集、处理与特征分析,确定手术实施策略,此阶段主要由机器人的规划导航定位部分来确保手术的操作与运行。下面针对骨科机器人的3个组成系统进行系统分析。 "

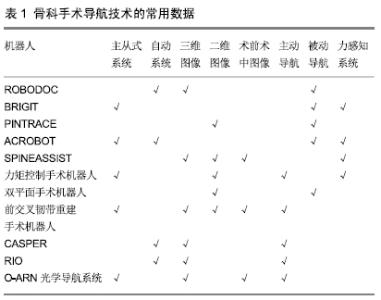
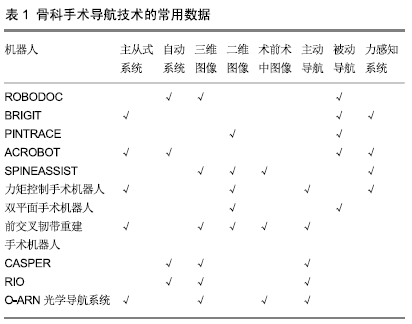
2.1.1 机械系统 机械臂是骨科机器人的最终执行终端及术后效果的直接体现,需要充分保证其精确性、灵活性、人性化及可靠性。值得注意的是在以往临床应用中出现了机械臂冲突的情况。2013年通过嵌入式现场可编程门阵列设备替代关节力矩传感,增加了机械臂的精确度[7]。研究表明,机械臂在结构上需要保持运动精确平稳,减少元件损害,延长使用寿命[8-9];对于机械臂的末端反馈灵敏度仍需要进一步提升,需要联合视、力、触、滑觉的四模态执行机构共同反馈;对机械臂末端手术器械仍需进一步改进,不能局限于操作的标准化;对于复杂机械臂甚至可实现由多名术者同时进行手术。通过对机械系统的改良,可以预见传统微创手术甚至可以更“微”,使手术操作更加安全可靠,减少手术的二次伤害,增加患者满意度。 2.1.2 影像系统 骨科机器人的影像系统当顺应影像学精、准、细的发展趋势,为术者提供更清晰、更真实的影像资料,促进定位及导航精准化。通过对比手术前后影像建立数据库,进一步调整骨科机器人的手术规划[10]。对于微小脏器,提供安置微型机器人,辅助影像系统,实时监控体内变化,增加手术精准度。随着虚拟现实技术的发展,构建虚拟手术仿真系统[11],能够有效协助医师熟练骨科机器人相关操作,也可模拟手术过程,优化手术步骤,保证了手术的可靠与安全。 2.1.3 计算机导航系统 计算机辅助导航技术是骨科手术机器人的核心,按照医学图像成像方法不同,主要经历了CT导航、X射线透视导航、无图像导航、超声技术导航、激光导航等几个阶段[12]:①基于CT的导航系统:录入患者术前手术部位的CT图像,在术中根据图像进行导航定位;②基于X射线透视图像的导航系统:C型臂机在术中实时拍摄X射线透视图像进行导航定位,利用C型臂机进行连续多平面透视拍摄,由专业系统多角度进行三维重建,从而使术者定位清晰,增加手术可靠性;③无图像导航:无需依靠术前或者术中透视图像,通过光与电信号确定患者体位标记与解剖结构,可以与传统的CT导航、X射线透视导航结合使用;④超声导航:其优势是无辐射、无创伤、可进行实时跟踪。由于超声波回弹测距原理,可以检测到骨胳的轮廓及结构,通过光学信号检测超声探头位置,再通过计算、定位配准技术获得超声轮廓,并与术前影像实时对准。目前已经有大量的基础、临床实验对超声配准进行了深入研究[13-15],由于声速、传播距离、软组织形变等因素影响,尚未临床推广。 同时,术者操纵机器人的行为标准化及解剖学位置的确定对机器人辅助手术也至关重要。导航功能通过对手术机器人的实时定位和跟踪让医生更加明确手术器械和患者的相对位置关系[16],从而更加高效安全地完成手术,在一定程度上可以降低对手术机器人自身精度和刚度的要求。现今的导航技术发展多样且较为成熟,但无创、无辐射、高精度、实时追踪仍是导航技术未来研究发展方向。 对于手术机器人来说,由于术中操作会引起软组织形变而导致解剖位置发生变化,这会使空间标定的非线性化而引起误差,包括术前图像、定位系统、传感系统、操作器械引起的误差,所致使手术器械精确定位面临较多的误差,最终导致手术失败。因此手术机器人将术前规划与术中实际相结合需要考虑患者模型建立问题及手术器械的相对稳定和引导问题,要有效解决以上这些问题,术中导航技术对于手术机器人的实际应用及发展起至关重要的作用。对于常用骨科机器人导航技术的分析,文章综合了导航技术的常用数据,见表1。 "

2.2 机器人技术在骨科手术中的应用 2.2.1 国外机器人技术在骨科手术中的应用 从骨科人工智能的发展历史来说,1988年美国研发了一款用于人工髋关节置换的机器人,优点在于运用视觉系统对骨骼的切削精确化[17];不久Integrated Surgical Systems公司研发了RoboDoc机器人——全球首款骨科手术机器人,并完成了全球首例手术机器人辅助人工全髋关节置换手术,其研发与试验的成功是世界医学领域上的一个里程碑,但其中仍然存在着手术时间过长及系统缺乏稳定性等问题,并且术中造成坐骨神经损伤的风险较高。随着科技的进步,各国不断进行改良创新,一大批手术机器人供术者选择,如英国的Acrobot机器人系统、瑞典的骨科机器人手术平台PinTrace、法国的小型模块化机器人 Praxiteles及美国的RIO系统和Navio PFS机器人系统等手术机器人[18]。 目前普遍认为应用骨科手术机器人的主要目的在于:为手术中的骨骼提供精准的切割及改善对于内置物和骨胳肌肉的接触[19],从而提高手术精准度及成功率,使术中操作更为可靠。至今,骨科手术机器人大多用于膝关节或髋关节置换手术,也有一些应用于脊柱和创伤手术中。 在关节手术中的应用:①在膝关节单髁置换术中的应用:膝关节单髁置换放置假体时容易出现对线不良、假体不匹配,导致假体松动、过度磨损等问题。随着技术的进步,医学界已经研发出多种手术机器人辅助完成关节置换手术。机器人系统分为3个主要类型:被动型、半主动型、主动型,其他包括触觉型和自主型。被动系统机器人监测手术的进展,并向医生提供详细信息,医生仍然使用传统工具,具有完全的自主控制权[17],如Hip Nav、Knee Nav;半主动系统如RIO、Acrobot等是由医生下达命令并控制机械完成手术操作的同时机械约束医生,减少失误[20];主动型系统机器人执行手术而不需要医生直接干预,如Robodoc和Caspar。RIO系统机器人可以根据患者身体条件和差异决定内置物的材质、尺寸、位置、对位及精确规划出需要切割的区域,这有效解决了对位不良等问题。LONNER等[21]临床研究显示,人工传统成形术后的对线差异度达到了机器人辅助手术的2.6倍。COBB等[22]通过随机对照试验将传统人工置换与Acrobot机器人系统辅助手术效果做对比,结果显示Acrobot机器人辅助手术组术后胫股骨对线角度与原计划位置的误差小于2°,而传统徒手人工置换组中仅有40%达到机器人辅助组的水平,平均误差远大于2°,机器人辅助手术的优势显而易见。②在全膝关节成形术中的应用:术者的术前规划能力、对位对线能力、植入假体能力、组织修复能力对于传统全膝关节成形手术的成功起到至关重要的作用。例如胫骨、股骨和髌骨需要切割磨合成与假体吻合的形态,才能保证膝关节的功能活动及假体植入后无痛感。大量研究表明,全膝关节成形术早期失败的原因与下肢内翻和胫骨近端翻切>3°密切相关[23]。而这些由于人工操作带来的不精准都可以由手术机器人解决。MOON等[24]通过尸体实验比较Robdoc机器人系统辅助全膝关节成形术和传统全膝关节成形术恢复关节对位和机械轴线方面情况,结果示Robdoc辅助全膝关节成形术和传统全膝关节成形术在机械轴线、股骨假体对位、胫骨假体对位、胫骨矢状角无明显差异,在旋转对线与髁轴方面明显优于传统全膝关节成形术。有些学者认为机器人辅助全膝关节成形术恢复膝关节功能较之传统全膝关节成形术无明显优势。SONG等[25]设计前瞻性随机试验比较了机器人辅助与传统全膝关节成形术的结果,显示两者术后膝关节活动度无显著差异;1年后随访,KSS膝关节功能评分、WOMAC评分、机械轴、矢状面假体对位和机械轴异常值有显著差异,得出结论:尽管机器人全膝关节置换在影像学上有了改善,但不能证明这些差异对术后结果有影响。③在全髋置换中的应用:Robodoc机器人系统、Acrobot机器人系统及 RIO机器人系统利用术前三维CT影像对骨盆、髋臼及股骨近端的病灶进行准确测量,从而使内置物与病灶处精确吻合。SCHULZ等[26]完成了97例患者的全髋置换,平均随访3.8年,通过改良Merled'Aubigne-Postel髋关节运动功能评定术前为8.1分,术后达16.2分,数值具有统计学意义。YAMAMURA等[27]将骨水泥移除范围、可负重时间、社会功能评定和并发症作为评估标准,结果显示:19例病例骨水泥完全移除;术后Merle d'Aubigne-Postel髋关节功能评分上升至14分,较术前提高4分;术后1周内可负重患者达到9例;术后2周全部患者均可负重;无股骨穿孔及破裂的并发症。证明手术机器人未增加患肢短缩及异位骨化的发生,且该通过提前设计避免了人为失误,从而明显提高了手术成功率。 在脊柱手术中的应用:SpineAssist机器人系统主要为脊柱融合术中螺钉人工植入过程提供精确的方向导引,用于椎弓根螺钉手术和经椎板关节突螺钉固定手术,是目前唯一可用于脊柱微创手术的机器人产品。ONEN等[28]回顾了27例患者术前、术中及术后的资料,将术后临床资料及影像学资料与术前相比,螺钉位置的准确率在98.5%,置入每根螺钉X 射线暴露的平均时间仅为 1.3 s。DEVITO等[29]设计了关于Spine -Assist机器人系统辅助脊柱手术的多中心回顾性研究,统计了840例患者的资料进行分析,术后CT显示98.3%的螺钉在安全区域内,其中89.3%完全在椎弓根内,与传统徒手手术相比,Spine Assist机器人系统明显提高了螺钉置入的准确性。大量临床试验表明SpineAssist可显著提高置入物精确性、减少辐射,尚无发生永久神经损伤的报道[30-32]。 在创伤手术中的应用:LEFAIVRE等[33]研制了一种骨盆额复位架,在透视导航下辅助完成骨盆骨折的复位并能维持复位以进行骨折固定,临床应用获得了满意结果。骨盆和髋臼骨折手术分为常规透视引导下与利用透视计算机导航引导置入经皮螺钉术两种。与常规透视引导下的手术操作相比较,基于导航辅助的骶髂关节螺钉内固定在透视时间、骶髂螺钉置入手术准确率方面有明显优势[34]。股骨颈骨折的手术方式众多,空心拉力螺钉内固定成为治疗年轻股骨颈骨折和老年无移位性股骨颈骨折的主要方式。传统的空心钉置入方法与术者经验息息相关,可能导致骨折不愈合、股骨头坏死和内固定失效等并发症,影响患者的功能预后。手术机器人可以提高手术操作的精准度和治疗效果,并减少X射线辐射对术者和患者的损伤,真正实现骨折的精准化治疗[35]。目前骨科机器人主要用于关节置换和脊柱外科,针对创伤骨科的机器人应用研究相对较少,需要不断创新、不断进步,实现创伤修复精准化[36]。 2.2.2 国内手术机器人研究进程 中国骨科手术机器人的相关研究始于20世纪90年代中期。与发达国家相比,国产骨科手术机器人仍处于初级阶段,目前主要研究及使用单位主要有北京积水潭医院、解放军总医院、洛阳正骨医院等医疗机构及北京航空航天大学、第三军医大学、哈尔滨工业大学、中国科学院沈阳自动化研究所、上海交通大学等科研机构[37]。伴随着科学技术的进步,2004年中国完成了首例机器人辅助骨科手术的临床试验,解决了传统骨折内固定定位困难、主要依赖术者经验及术中透视角度差等问题[38-39],但存在术中系统骨折内固定定位困难等不足。随后,上海交通大学与上海第二医科大学联合研发了适用于人工关节置换手术的小型机器人系统,可通过骨夹直接固定于患肢。2006年完成了中国首次骨科手术机器人远程异地手术并取得良好成果,这一次的成功不论从理念上还是从技术上都验证了实现骨科手术远程化的可能性,促进了远程骨科医学的发展,为骨科手术的现代化积累经验。此举使中国荣获了首个骨科机器人Ⅲ类器械注册证,填补了中国此领域的空白,开启了骨科手术的新篇章。2015年北京积水潭医院应用TiRobot骨科手术机器人完成了全球首例实时三维影像的机器人辅助胸腰椎骨折内固定和首例颈椎畸形矫正手术,术后效果良好[40]。 虽然中国近年来手术机器人相关科研成果较多,但真正进入产业化的科技成果所占比例却很低。其中整骨骨科机器人是中国特色产品,综合运用中国传统中医的正骨技术对患者骨组织进行修复治疗。综合利用现代影像技术于与计算机技术对患处进行整体分析,得出整复数据,然后利用导航技术通过对整骨机器人机械系统发送指令完成整复。整骨骨科机器人具有辐射量少、康复快、缓解水肿和并发症少等特点。整骨骨科机器人是由哈尔滨第五医院研制的计算机模拟智能整骨机,该院先后与哈尔滨工业大学、哈尔滨工程大学、黑龙江大学联合研制了六自由度机械臂[41],完善了三维图像导航系统,提升了骨折整复网络控制技术,使用该机器人完成上百例手术,成功率达100%。手术机器人的出现进一步促进了医疗进步与发展,指明了未来医学发展方向,促进了各学科之间的联系,标志着医疗行业已经进入了智能化时代[42-43]。 "

| [1] 邵泽宇,徐文峰,廖晓玲,等.骨科机器人的发展应用及前景[J].军事医学, 2016,40(12):1003-1008. [2] PUTZER D, KLUG S, HASELBACHER M, et al.Retracting Soft Tissue in Minimally Invasive Hip Arthroplasty Using a Robotic Arm: A Comparison Between a Semiactive Retractor Holder and Human Assistants in a Cadaver Study.Surg Innov. 2015;22(5):500-507. [3] 王军强,孙磊,王满宜.计算机辅助骨科手术的应用和进展[J].中华创伤骨科杂志,2004,6(1):110-114. [4] SUGANO N.Computer-assisted orthopaedic surgery andRobotic surgery in total hip arthroplasty.Clin Or thop Surg. 2013;5(1):1-14. [5] 徐兆红,宋成利,闫士举.机器人在微创外科手术中的应用[J].中国组织工程研究与临床康复,2011,15(35):6598-6601. [6] 倪自强,王田苗,刘达.医疗机器人技术发展综述[J].机械工程学报, 2015, 51(13):45-52. [7] ZHU WH, LAMARCHE T, DUPUIS E, et al.Precision control of modular robot manipulators: the VDC approach with embedded FPGA.IEEE Transact Robot. 2013;29(5):1162-1179. [8] NG AT, TAM PC.Current status of robot-assisted surgery.Hong Kong Med J.2014;20(3):241-250. [9] AUTORINO R, KAOUK JH, STOLZENBURG JU, et al.Current status and future directions of robotic single-site surgery: a systematic review.Eur Urol.2013;63(2):266-280. [10] 苏永刚,张维军,王豫.骶髂关节螺钉手术导航机器人系统设计及实验研究[J].北京生物医学工程,2013,32(4):331-335. [11] 孙立宁,杨东海,杜志江,等.遥操作正骨机器人虚拟手术仿真系统研究[J].机器人,2004,26(6):533-537. [12] 赵燕鹏,唐佩福,骨科机器人及导航技术研究进展[J].中国矫形外科杂志, 2016,24(3):242-246. [13] BROUNSTEIN A, HACIHALILOGLU I, GUY P, et al.Fast and accurate data extraction for near real - time registration of 3 - D ultrasound and computed tomography in orthopedic surgery. Ultrasound Med Biol. 2015;41(12):3194-3204. [14] SCHNEIDER C, NGUAN C, ROHLING R, et al.Tracked "Pick-Up" Ultrasound for Robot-Assisted Minimally Invasive Surgery.IEEE Trans Biomed Eng. 2016;63(2):260-268. [15] NAGPAL S, ABOLMAESUMI P, RASOULIAN A, et al.A multi-vertebrae CT to US registration of the lumbar spine in clinical data.Int JComput Assist Radiol Surg. 2015;10(9):1371-1381. [16] IAVAZZO C, GKEGKES ID.Application of da Vinci Robot in simple or radical hysterectomy: tips and tricks.J Turk Ger Gynecol Assoc.2016; 17(2):106-109. [17] LANG JE, MANNAVA S, FlOYD AJ, et al.Robotic systems in orthopae-dic surgery.J Bone Joint Surg Br. 2011;93(10):1296-1299. [18] 田伟.骨科机器人研究进展[J].骨科临床与研究杂志, 2016,1(1):55-57. [19] YANG M, JUNG J, KIM J, et al.Current and future of spinal robot surgery.Kor J Spine.2010;7(2):61-65. [20] DAVEY SM, CRAVEN MP, Meenan BJ, et al.Surgeon opinion on the new technologies in orthopaedic surgery.J Med Eng Technol. 2011; 35(3-4):139. [21] LONNER JH, KERR GJ.Robotically Assisted Unicompartmental Knee Arthroplasty.Oper Tech Orthop.2012;22(2):182-188. [22] COBB J, HENCKEL J, GOMES P, et al.Hands-on robotic unicompart-mental knee replacement: a prospective,randomised controlled studyof the acrobot system.J Bone Joint Surg Br. 2006; 88(2):188 -197. [23] 张军良,周幸,吴苏稼.手术机器人系统在骨科的应用[J].中国矫形外科杂志,2015,23(22):2079-2082. [24] MOON YW, HA CW, DO KH, et al.Comparison of robot-assisted and conventional total knee arthroplasty:a control cadaver study using multiparameter quantitative three-dimensional CT assessment of the alignment.Compute Aided Surg. 2012;17(2):86. [25] SONG EK, SEON JK, PATRK SJ, et al.Simultaneous bilateral total knee arthroplasty with robotic and conventional techniques: a prospective, randomized study. Knee Sports Traumatol Arthrosc.2011;19(7):1069. [26] SCHULZ AP, SEIDE K, QUEITSCH C, et al.Results of total hip replacement using the Robodoc surgical assistant system:clinical outcome and evaluation of complications for 97procedures.Int J Med Robot.2007;3(4):301-306. [27] YAMAMURA M, NAKAMURA N, MIKI H, et al.Cement removal from the femur using the ROBODOC system in revision total hip arthroplasty. Adv Orthop.2013;2013:347358. [28] ONEN MR, SIMSEK M, NADERI S.Robotic spine surgery: a preliminary report.Turk Neuro Surg.2014;24(4):512-518. [29] DEVITO DP, KAPLAN L, DIETL R, et al.Clinical acceptance and accuracy assessment of spinal implants guided with Spine Assist surgical robot:retrospective study.Spine(Phila Pa 1976). 2010;35(24): 2109-2115. [30] RINGEL F, Stuer C, Reinke A, et alAccuracy of robot-assisted placement of lumbar and sacral pedicle screws:a prospective randomized comparison to conventional freehand screw implantation. Spine(Phila Pa 1976).2012;37(8):496-501. [31] DREVAL ON, RYNKOV IP, KASPAROVA KA, et al.Results of using Spine Assist Mazor in surgical treatment of spine disorders.Zh Vopr Neirokhir Im N N Burdenko. 2014;78(3):14-20. [32] SCHATLO B, MOLLIQAJ G, Cuvinciuc V, et al.Safety and accuracy of robot-assisted versus fluoroscopy-guided pedicle screw insertion for degenerative diseases of the lumbar spine:a matched cohort compari-son.J Neurosurg Spine. 2014;20(6):636-643. [33] LEFAIVRE KA,STARR AJ,BARKER BP,et al.Early experience with reduction of displaced disruption of the pelvic ring using a pelvic reductionframe.J Bone Joint Surg Br. 2009;91(9):1201-1207. [34] EASTMAN JG, Routt MLC.Correlating preoperative imaging with intraoperative fluoroscopy in iliosacral screw placement.J Orthpoaed Traumatol.2015;16(4):309-316. [35] LI J, WU T, XU Z, et al.A pilot study of post-total knee replacement gait rehabilitation using lower limbs robot-assisted training system.Eur J Orthop Surg Traumatol. 2014;24(2):203-208. [36] Parsley BS.Robotics in Orthopedics:A Brave New World.J Arthroplasty. 2018;33(8):2355-2357. [37] 韩晓光,刘亚军,范明星,等.骨科手术机器人技术发展及临床应用[J].科技导报,2017,35(10):19-25. [38] 赵春鹏,王军强,刘文勇,等.骨科机器人系统全程规划模块在长骨骨折精确牵引中的研究[J].中华医学杂志, 2007,87(43):3038-3042. [39] 王军强,王剑飞,胡磊,等.医用机器人辅助股骨带锁髓内针远端锁钉瞄准系统的实验研究[J].中华医学杂志,2006,86(9):614-618. [40] TIAN W. Robot-assisted posterior C1-2 transarticular screw fixation for atlantoaxial instability:A case report[J].Spine (Phila Pa1976),2016,41 (Suppl 19): B2-B5. [41] 刘思久,裴超,赵昌华,等.六自由度整骨机械手的计算机控制系统[J].伺服控制,2007,(1):31-34. [42] VASDEV N.Editorial comment to validation of an educational program balancing surgeon training and surgical quality control during robot-assisted radical prostatectomy.Int J Urol.2016;23(2):166. [43] LE HM, DO TN, PHEE SJ. A survey on actuators-driven surgical robots.Sensor Actuat A-Phys.2016;247:323-354. [44] 洪石,吴征杰,李灿辉.机器人辅助下股骨近端防旋髓内钉内固定治疗股骨粗隆间骨折8例[J].实用医学杂志, 2019,35(2):335-336. [45] 王军强.骨科手术机器人临床应用的优势和局限[J].中国医刊, 2016, 51(10): 1009-1010. [46] 张加尧,叶哲伟.智能医学时代骨科的发展[J].临床外科杂志, 2019, 27(1):31-32. [47] 苏日力格,刘旭,徐哲,等.机器人手术在关节外科中的应用进展[J].转化医学电子杂志,2017,4(12):77-80. [48] 郑海洋,马磊,张译寒,等.医疗机器人的手术应用研究[J].装备制造技术, 2013,41(9):226-228. [49] 宋国立,韩建达,赵忆文.骨科手术机器人及其导航技术[J].科学通报,2013, 58(S2):8-19. |
| [1] | Chen Jinping, Li Kui, Chen Qian, Guo Haoran, Zhang Yingbo, Wei Peng. Meta-analysis of the efficacy and safety of tranexamic acid in open spinal surgery [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(9): 1458-1464. |
| [2] | Zhang Wei, Hu Jiang, Tang Liuyi, Wan Lun, Yu Yang, Lin Shu, Tang Zhi, Wang Fei. Advantages of robot assisted percutaneous biopsy in the diagnosis of spinal lesions [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(6): 844-848. |
| [3] | Zhan Fangbiao, Cheng Jun, Zou Xinsen, Long Jie, Xie Lizhong, Deng Qianrong. Intraoperative intravenous application of tranexamic acid reduces perioperative bleeding in multilevel posterior spinal surgery: a meta-analysis [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(6): 977-984. |
| [4] | Shi Xiaoxiu, Mao Shilong, Liu Yang, Ma Xingshuang, Luo Yanfeng. Comparison of tantalum and titanium (alloy) as orthopedic materials: physical and chemical indexes, antibacterial and osteogenic ability [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(4): 593-599. |
| [5] | Peng Kun, Lin Yimin, Gan Xiaoling, Wu Zhiyong. Development prospect of orthopedic rehabilitation medicine based on three-dimensional printing technology [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(4): 632-637. |
| [6] | Liu Jinyu, Ding Yiwei, Lu Zhengcao, Gao Tianjun, Cui Hongpeng, Li Wen, Du Wei, Ding Yu. Finite element biomechanical study of full endoscopic fenestration decompression for cervical spondylotic myelopathy [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(24): 3850-3854. |
| [7] | Pan Xuan, Zhao Meng, Zhang Xiumei, Zhao Jie, Zhai Yunkai. Research and application of biological three-dimensional printing technology in the field of precision medicine: analysis of Chinese and English literature [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(21): 3382-3389. |
| [8] | Ren Xingyu, Zhang Yi, Xu Haoran, Fan Bin, Dai Shifeng, Liang Chunyu. Meta-analysis of the postoperative effects of robot-assisted unicompartmental knee arthroplasty versus conventional surgery [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(21): 3416-3422. |
| [9] | Jing Jinpeng, Zhang Yue, Liu Xiaomin, Liu Yi. Buyang Huanwu Decoction in prevention of deep venous thrombosis after orthopedic surgery: meta-analysis and trial sequential analysis [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(20): 3267-3274. |
| [10] | Li Shangzhi, Zheng Dezhi, Liu Jun. Early analgesia of cocktail therapy after total knee arthroplasty with enhanced recovery after surgery program [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(18): 2794-2798. |
| [11] | Zhong Yuanming, Fu Xiaopeng, Xu Wei, Zhao Qingrui, Huang Yong, Ye Weiquan. Nicardipine controlled hypotension applied to perioperative blood loss in orthopedics: a meta-analysis [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(18): 2930-2937. |
| [12] | Yang Kun, Fei Chen, Wang Pengfei, Zhang Binfei, Yang Na, Tian Ding, Zhuang Yan, Zhang Kun . Meta-analysis of the efficacy of robot-assisted and traditional manual implantation of cannulated screws in the treatment of femoral neck fracture [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(18): 2938-2944. |
| [13] | Cai Hongmei, Wang Wei, Wang Wenjuan, Zhou Xiaohong. Kinesiology taping combined with manual lymph drainage reduces postoperative lymphedema related to breast cancer [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(14): 2247-2251. |
| [14] | Ma Long, Tan Xiaoxin, Sun Guoshao. A 5-year follow-up on sagittal alignment and radiological outcomes of consecutive three-level anterior cervical discectomy and fusion and hybrid surgery [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(12): 1879-1885. |
| [15] | Zhou Chen, Xing Wenhua. Application advantages of three-dimensional printing technology and finite element analysis in scoliosis correction [J]. Chinese Journal of Tissue Engineering Research, 2021, 25(12): 1898-1903. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||