1.1 设计 生物力学测试实验。
1.2 时间及地点 该实验于2022年7-8月在北京师范大学运动生物力学实验室完成。
1.3 对象 于北京体育大学武术学院招募选取8位男性太极拳国家运动健将级别运动员(且获得全国太极拳比赛前3名),具体资料见表1。

经过纳入及排除标准筛选,受试者均签署了实验知情同意书,并使其了解实验步骤和目的。该研究方案于2022-02-24通过了国家康复辅具研究中心附属康复医院伦理委员会的审批,批准号:S20220206。
1.3.1 纳入标准 ①男性国家健将级太极拳运动员;②下肢无骨折损伤史;③优势腿为右侧;④排除身体运动功能障碍,无平衡能力缺失、无吸烟酗酒习惯、无心脑血管疾病、无呼吸系统疾病史、无眼部疾病史、无腰部损伤史者,能正常运动。
1.3.2 排除标准 ①身高体质量差异过大;②无法正常交流者;③健康状况受损,有眼部疾病、腰部疾病。
1.4 实验设备 采用8台高精度红外线光学运动捕捉系统(BTS SMART DX 700,BTS Bioengineering公司,意大利)采集运动数据,数据采集频率为250 Hz,分辨率为640 dpi × 480 dpi,精度在4 m×3 m×3 m 的空间下小于0.2 μm。采用3台三维测力台(9287B,Kistler公司,瑞士)采集地面反作用力数据,频率为1 000 Hz。用SMART CAPTURE软件高速捕捉受试者身上的骨性标记点即25个Mark反光球标记点(直径是1.4 cm,)的运动轨迹,见表2。实验场景图见图1。

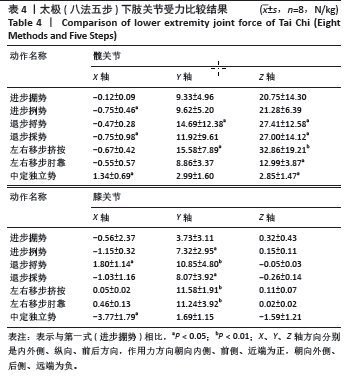
X轴是冠状面与水平面的交叉线,Y轴是矢状面和水平面的交叉线,Z轴是冠状面与矢状面的交叉线[6]。X,Y,Z 轴方向分别是内外侧、纵向、前后方向,作用力方向朝向内侧、前侧、近端为正,朝向外侧、后侧、远端为负[7]。
1.5 方法
1.5.1 太极拳(八法五步)7组步法动作划分及阶段定义 太极(八法五步)作为太极拳简化套路,其中步法动作主要是由前、后、左、右、中共5个方向构成的,又称为进、退、顾、盼、定5种步法移动,而步法动作按照5种方向移动并结合8种基本手型(掤、捋、挤、按、採、挒、肘、靠)可分为7组动作,分别是进步掤势、进步挒势、退步捋势、退步採势、左右移步挤按、左右移步肘靠、中定独立势。前进方向的步法动作包括进步掤势、进步挒势两个动作,后退方向的步法动作包括退步捋势、退步採势两个动作,左右横移方向的步法动作包括左右移步挤按、左右移步肘靠两个动作,中间原地的步法动作为中定独立势,是一个平衡动作[8]。如表2所示,对太极拳(八法五步)7组步法动作进行划分,记录太极拳(八法五步)7组步法动作运动过程的下肢动力学参数。
1.5.2 Anybody骨肌模型建立 Anybody 7.2(Anybody Technology公司,德国)能够建立人体仿真骨肌模型,用于处理三维动作捕捉后的运动学动力学数据,该软件已经过多次验证,可靠性强,精度高[9-10]。调用已经建立完毕的骨骼-肌肉模型,选择 Lower-Extremity-Model,采用 Scaling-Length-Mass-Fat模型缩放方式通过受试者体质量与身高数据对模型进行调整,此放缩方式分别由体质量与骨骼长度控制模型的质量与尺寸,并充分考虑脂肪比例对人体各骨骼质量的影响,使模型脂肪比例和身高、体质量保持协调[11]。考虑到肌肉的并行被动弹性单元、肌腱的串行弹性单元、肌肉纤维 Pinnation 角等肌肉特性,研究中肌肉模型使用希尔类型(Hill-type)肌肉模型,其由收缩元、串联弹性元以及并联弹性元组成,以再现运动过程中人体肌肉特性。同时基于现象学原理,为模拟真实肌肉生理收缩方式,肌肉募集方式采用最大最小募集的辅助模式(MR-Min-Max-Aux)。
在此募集方式下,人体系统中任何肌肉工作时的最大相对负载尽可能地小,将最大限度地发挥其耐力,即是生理上最低的疲劳标准。文章采用真实Mark 点驱动模型,对模型中Mark 点名称、数量等参数进行修改,并调整 Mark 点以及下肢各体节的初始位置以拟合真实数据初始位置。见表3,最终将已采集的太极(八法五步)不同步法动作的C3D运动数据加载到模型中,构建为太极(八法五步)步法动作模型。

1.5.3 构建有限元模型 股骨的有限元模型是根据受试者右腿股骨的CT创建的,将股骨CT的DICOM数据格式导入Mimics 20.0 (Materialise,Leuven,Belgium),将其分为四面体导出STL格式,然后利用坐标系将其与 Anybody骨肌模型的右腿股骨进行置换,利用Geomagic Wrap 2013 (Geomagic Company,Research Triangle Park,NC,USA)对模型进行网格修复,填补孔洞和尖角,处理完成后导出iges格式。最后通过使用CATIA V5R20软件中对有限元模型进行实体化处理及模型内孔洞处理。将处理好的有限元模型添加在ANSYS 19.2 workbench(Swanson Analysis Inc.,Houston,PA,USA)软件中进行应力分析。
模型提取:计算机打开 Mimics 20.0软件(Materialise,Leuven,Belgium),将骨骼 CT图像以DICOM格式导入软件,获得骨骼的矢状位、冠状位及水平位的图像。建立 Mask,根据构成骨骼的成分利用灰度值进行划分提取,将提取出的骨骼通过 Smooth mask 进行完善,所有提取物最终以 STL 格式导出软件。
模型的顺滑:膝关节模型 在 Geomagic Wrap 2013 (Geomagic company,Research Triangle Park,NC,USA) 软件中对骨骼各结构模型进行光滑处理。逐一将骨骼各结构的 STL 格式文件打开,根据提示选择网格医生进行首轮处理,将软件识别出的特征去除,选择砂纸粗略光顺、雕刻选项进行修补等,再进行曲面化,最终得到有限元模型,选择 IGS格式导出,见图2。

材料特性:为了简化模型,所有组织均为均匀的同性材料,其材料特性参考了WIRTZ等[12]的论文研究和实验结果(股骨弹性模量为11 000 MPa,泊松比为0.2)。并基于Mooney-Rivlin模型的超弹性材料特性,即应变能量密度函数W由以下公式给出[13]:W=C10 (I1-3)+C01 (I2-3)
网格生成:使用由10个节点组成的四面体元素对股骨有限元模型进行了网格划分,见图4a,该模型的元素和节点总数分别为126 324和61 545。元素的平均质量为0.80,表明网格质量良好。
载荷和边界约束:该实验是在静态模拟环境中进行,为了正确模拟在太极(八法五步)7组步法动作的运动条件,采用 Anybody 软件中的 AnyFE2Abq插件功能,导出有限元软件需要的关节力及边界条件。将股骨模型与关节力和力矩同时导入Workbench软件中进行加载,通过手动调整肌肉附着点的大小和位置,使之与正常肌肉解剖位置及大小相符合[14]。根据太极拳由下至上的用力特
点[15],模拟最符合太极拳的受力特点,因而选择了股骨下端的膝关节受力进行分析,股骨周围力的加载和边界约束,见图4b。

1.5.4 数据采集与处理 该实验在某高校运动生物力学实验室进行。被试者需身穿统一短裤及黑色短袜,这样可以降低衣服带来的抖动以及不同鞋子对测力台的误差。仪器调试:需要对BTS红外动作捕捉摄像机摆放位置和高度位置进行调整,每台摄像头之间的距离至少2 m,高度至少3 m,以半弧状环绕于测试中心四周。实验前进行调试,检验设备是否能够正常运行,以确保每台摄像机能捕捉到受试者完整动作及全身的画面。仪器校准包括:空间全局坐标系的校准、测力台坐标和位置的校准,并打开BTS Vixta实验记录摄像仪(Elite,Bioengineering Technology and System,Milano,Italy),记录整个实验过程。
动力学数据:根据太极(八法五步)步法动作的周期性特点,且步法动作左右两边的运动都是相同的,且受试者优势侧为右侧,因此选取了右腿的动力学数据进行研究。在BTS系统采集软件SMART Capture(Elite,Bioengineering Technology and System,Milano,Italy)按照下肢运动模型进行数据采集,通过8台BTS SMART DX 700(Elite,Bioengineering Technology and System,Milano,
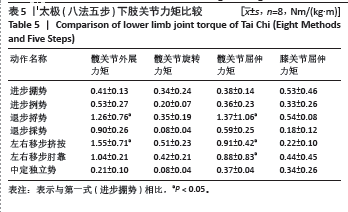
Italy)摄像机对受试者身上反射标志物的移动数据进行建模处理,然后对被试数据进行帧数截取,在BTS tracker中进行模型连线。在完成处理后导出C3D格式的文件,利用Anybody人体建模仿真软件,将截取的运动学数据C3D文件导入Anybody 7.2 仿真软件进行计算,建立了太极(八法五步)7组步法动作的骨肌模型,见图5,计算流程依次为:优化反射标识点-动力学计算-逆向动力学计算,计算完成后得到动力学数据,将动力学指标导入Excel中进行标准化处理,对下肢关节受力和关节力矩值进行标准化处理,关节受力表示为受力数值计算值除以体质量(单位:N/kg),关节力矩表示为受力数值除以体质量与身高的乘积[单位:Nm/(kg·m)] [16]。

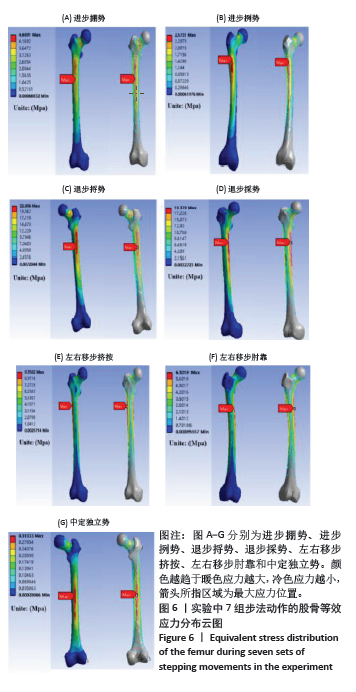
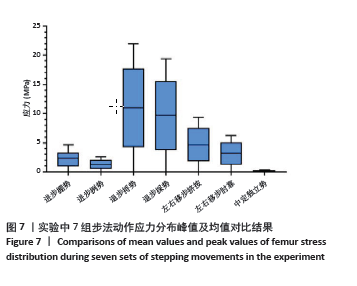
1.6 主要观察指标 以8名男性太极拳国家健将级运动员进行太极(八法五步)7组步法动作中下肢主要关节的关节力、关节力矩和股骨的应力峰值为主要观察指标。
1.7 统计学分析 使用 SPSS 25.0软件(IBM Corp.,Armonk,NY,USA) 进行统计分析。运动学数据、动力学数据、关节力等计量资料通过Shapiro-Wilk进行正态性检验,符合正态分布以x±s形式表示。采用单因素方差分析进行统计分析,同时进行方差齐性Levene检验,方差不齐时采用Tamhane’s T2方法进行统计分析。P < 0.05为差异有显著性意义。
中国组织工程研究杂志出版内容重点:人工关节;骨植入物;脊柱;骨折;内固定;数字化骨科;组织工程