中国组织工程研究 ›› 2020, Vol. 24 ›› Issue (21): 3287-3292.doi: 10.3969/j.issn.2095-4344.2679
• 骨与关节生物力学 bone and joint biomechanics • 上一篇 下一篇
基于坐标变换理论分析Ilizarov骨外固定架矫形力传导效率
胡湘宇1,苏 鹏1,2,张 力2,3,李 剑2,秦泗河3,樊瑜波2,4
- 1北京信息科技大学机电工程学院,北京市 100192;2国家康复辅具研究中心,民政部康复辅具技术与系统重点实验室,北京市 100176;3国家康复辅具研究中心附属康复医院,北京市 100176;4北京航空航天大学生物与医学工程学院,生物力学与力生物学教育部重点实验室,北京市 100191
Transmission efficiency of Ilizarov external fixator orthopedic force based on coordinate transformation theory
Hu Xiangyu1, Su Peng1, 2, Zhang Li2, 3, Li Jian2, Qin Sihe3, Fan Yubo2, 4
- 1School of Electromechanical Engineering, Beijing Information Science and Technology University; 2Key Laboratory of Rehabilitation Aids Technology and System of the Ministry of Civil Affairs; 3Affiliated Hospital of National Research Center for Rehabilitation Technical Aids; 4Key Laboratory for Biomechanics and Mechanobiology of Ministry of Education
摘要:
文题释义:
坐标变换理论:是指空间实体的位置描述,通过已有的Ilizarov骨外固定架和胫骨的空间几何关系和结构,建立各坐标系统的一一对应关系,将各矫形力从一种坐标系统变换到另一种坐标系统的过程,用来描述调节力、支撑力和牵张力之间的相互关系。
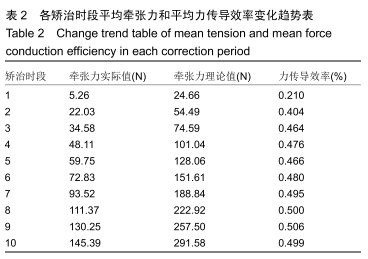
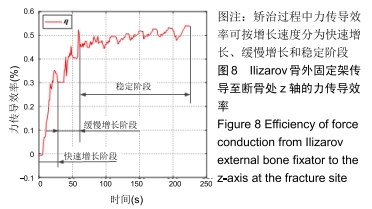
矫形力传导效率:是指将六维力传感器上z轴的实际数据和推导出的z轴矫治分力理论值的比值,其反映Ilizarov骨外固定架在矫治过程中将调节力和支撑力转换为断骨端牵张力的效率,其结果可评估外固定架的矫治效果以及为矫治手术的精准调控提供参考。
背景:Ilizarov骨外固定架力传导机制的研究对膝内外翻、胫骨骨折等临床畸形矫治手术具有重要意义。
目的:分析胫骨矫治过程中Ilizarov骨外固定架的力传导机制和各矫形力变化情况,客观评价外固定架整体使用效果。
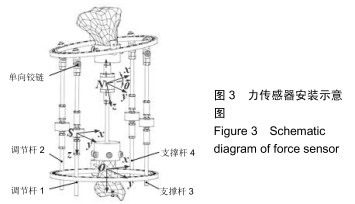
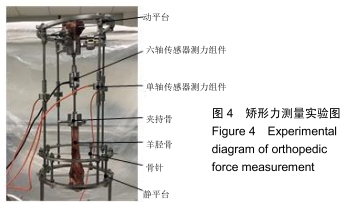
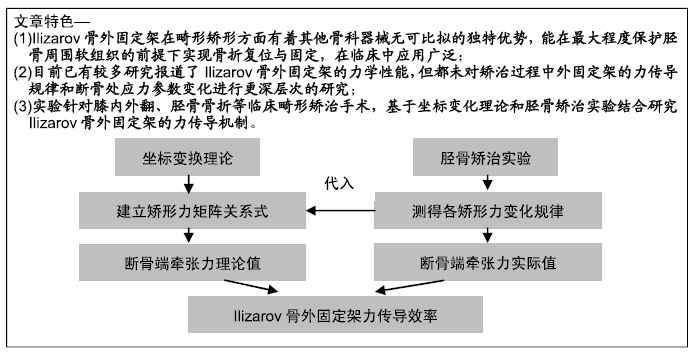
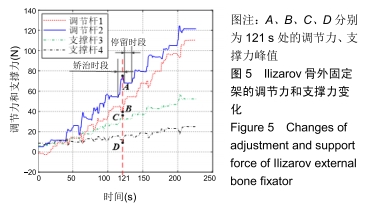
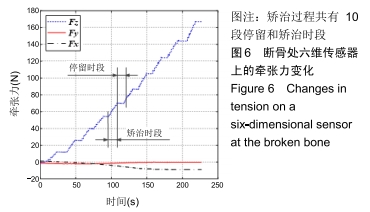
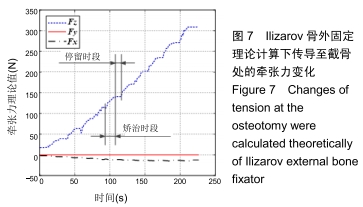
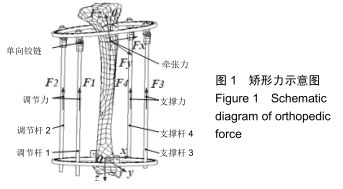
方法:根据骨外固定器的构型,基于坐标变换理论建立矫形力矩阵关系式,得到调节力、支撑力和牵张力之间的数学转换关系。搭建专用实验台,以羊胫骨为实验对象进行胫骨矫治实验,测得骨外固定架调节杆上调节力、支撑杆上的支撑力及断骨处的牵张力,计算得出断骨处的牵张力理论值,与六维力传感器测得的牵张力实际值对比,得出矫治过程的力传导效率变化曲线。
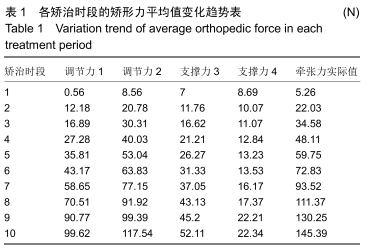
结果与结论:①在矫治过程中,Ilizarov骨外固定架的结构构型导致其调节杆和支撑杆存在相互作用和制约的情况,当某一调节力增大时另一调节力将出现下降的趋势;②力传导效率在前期存在较大幅度的增大,然后稳定在50%上下波动,实验结果可评估外固定架的整体矫治效果;③由于力传导过程中的损耗,断骨处的牵张力理论计算和实验结果曲线存在数值上的差别,但由实验结果可知,调节力、支撑力、牵张力理论值和牵张力实际值的整体力变化趋势基本一致,说明理论计算和实验结果的有效性,该实验量化评估结果可为Ilizarov骨外固定架构型的优化设计和胫骨矫治手术的精准调控提供参考。
ORCID: 0000-0003-1101-3109(胡湘宇)
中国组织工程研究杂志出版内容重点:人工关节;骨植入物;脊柱;骨折;内固定;数字化骨科;组织工程
中图分类号:


 ,αn
,αn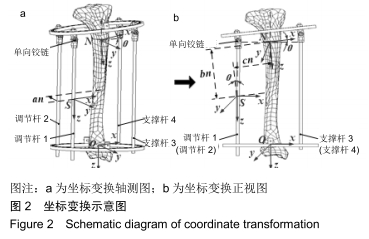

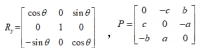 ,O为3*3阶零矩阵,在矫治的初始阶段,存在
,O为3*3阶零矩阵,在矫治的初始阶段,存在 ,其中,a、b和c的单位为mm。
,其中,a、b和c的单位为mm。