Chinese Journal of Tissue Engineering Research ›› 2024, Vol. 28 ›› Issue (35): 5709-5715.doi: 10.12307/2024.580
Previous Articles Next Articles
Propulsion deficits in hemiplegic gait of stroke patients
Zhi Liang1, Wang Yulong2, Zhang Qingfang1, Hong Yaqing1, Ke Meihua1, Liu Quanquan2, Long Jianjun2
- 1School of Rehabilitation Medicine, Shandong University of Traditional Chinese Medicine, Jinan 250355, Shandong Province, China; 2Department of Rehabilitation, Shenzhen Second People’s Hospital, Shenzhen 518035, Guangdong Province, China
-
Received:2023-11-09Accepted:2023-12-14Online:2024-12-18Published:2024-03-15 -
Contact:Long Jianjun, Associate professor, Master’s supervisor, Department of Rehabilitation, Shenzhen Second People’s Hospital, Shenzhen 518035, Guangdong Province, China -
About author:Zhi Liang, Master candidate, School of Rehabilitation Medicine, Shandong University of Traditional Chinese Medicine, Jinan 250355, Shandong Province, China -
Supported by:Emergency Clinical Research Project on New Coronavirus Infection at Shenzhen Second People’s Hospital, No. 2023xgyj3357006 (to LJJ); The Sanming Project of Medicine in Shenzhen, No. SZSM202111010 (to WYL)
CLC Number:
Cite this article
Zhi Liang, Wang Yulong, Zhang Qingfang, Hong Yaqing, Ke Meihua, Liu Quanquan, Long Jianjun. Propulsion deficits in hemiplegic gait of stroke patients[J]. Chinese Journal of Tissue Engineering Research, 2024, 28(35): 5709-5715.
share this article
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
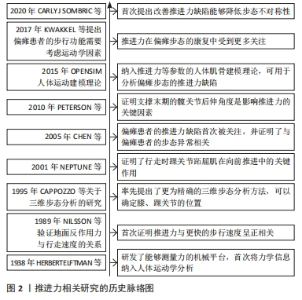
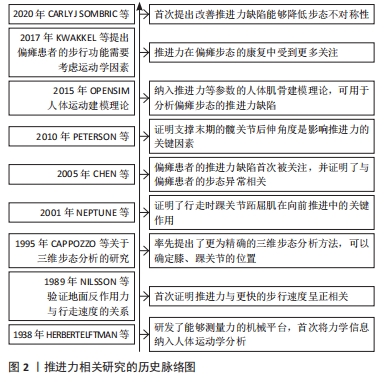
文章首先对偏瘫患者推进力缺陷相关研究的发展历程进行了梳理,见图2。基于能够测量力的机械平台[10],在1989年,行走时足底的推进力被证明与步行速度呈正相关[11],但并未阐明其作用机制。后来的几项研究利用三维步态分析证明了行走时的踝关节跖屈力矩及支撑末期的髋关节后伸角度是影响推进力的关键因素[12-14]。在这些研究的基础上,CHEN等[15]在2005年首次证明推进力缺陷是造成偏瘫患者步态异常的重要原因。此外,SOMBRIC等[16]指出偏瘫患者的推进力缺陷与步态不对称性相关。近些年来,偏瘫患者步行时的推进力缺陷越来越受到关注[7],Opensim人体运动建模理论等也被应用于该领域研究[17]。文章在梳理该领域发展历程的基础上,对推进力的生物力学、推进力与步态的关系及改善推进力的康复措施等方面进行全面综述。"
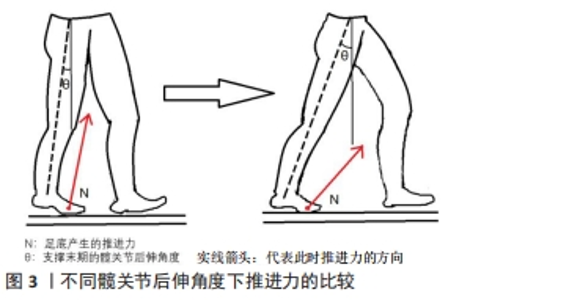
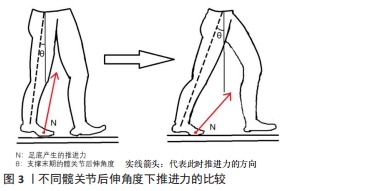
2.1 推进力相关生物力学和神经学研究基础 2.1.1 推进力的生物力学 在步态周期中,足趾离地是一个关键阶段,它有助于从站立的姿势过渡到摆动,并直接关系到身体重心的向前转移以及随后的推进,踝关节跖屈力矩对推进力的大小至关重要[18]。但产生有效的推进力还需要满足一个条件:支撑末期的髋关节后伸角度(trailing limb angle,TLA),即足蹬离地面瞬间一侧下肢的髋关节后伸角度。当TLA不足时,跖屈力矩只会转变为向上的力,单纯地将身体向上提起。当这个角度达到合适范围时,踝关节跖屈力矩有效地转变为向前的推进力,见图3,即前地面反作用力(anterior ground reaction force,AGRF),有研究表明水平方向的推进力产生与TLA正相关[19-20]。"
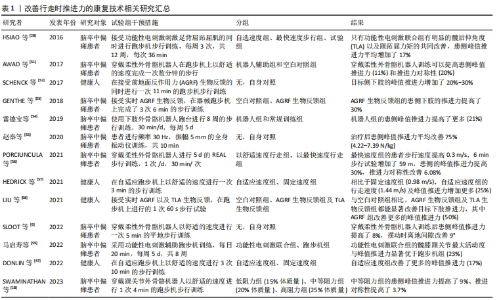
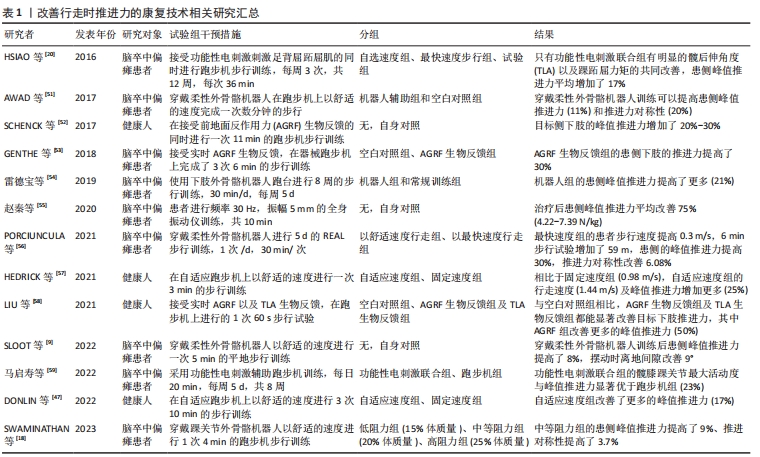
偏瘫患者大部分都存在无法在足趾离地的推进阶段激活跖屈肌或者受活动度的限制(例如,踝关节挛缩及髋部伸展角度减小),这在物理上减弱了踝关节跖屈力矩转化为推进力所需的TLA。可能患者具有全关节活动范围,但在患侧下肢摆动时不能定位在躯干后方的合适位置,例如平衡障碍或者心理障碍等。此外,膝关节伸肌力矩也与TLA及推进力的促进相关[20],髋、膝关节伸肌一方面为推进力提供了直接的肌力;另一方面,为踝跖屈肌提供了更佳的运动学位置以向前而不是向上推进。例如一项研究中为了弥补推进力的不足,患者产生了更多的踝关节跖屈力矩和膝关节伸肌力矩[21]。另外,在摆动腿的离地摆动阶段过大范围的髋关节伸展可能会抑制股四头肌活动,因此在行走期间需要合适的髋、膝关节伸展以产生更大的推进力[22]。 综上所述,在足蹬离地面的瞬间到下肢向前摆动完成前进的一系列动作中,推进力的产生需要适配的TLA和踝关节跖屈力的双重支持,其中与髋、膝关节的伸展相关的TLA以及适当时机和强度的踝关节跖屈肌力矩是正常推进力的基础。而由于不同的原因导致的推进力缺失需要结合偏瘫患者行走时的生物力学以及神经肌肉因素来判断,以制定以推进力为目标的个性化治疗方案。 2.1.2 脑卒中患者推进力缺陷的神经学研究基础 脑卒中偏瘫患者的运动障碍由皮质发出的运动信号丢失或脊髓运动神经元中断引起。运动信号下行的主要通路是皮质脊髓束,作为控制自主、分段运动的主要途径,其完整性决定了推进力的大小[23]。对踝关节跖屈肌具有更对称的皮质运动输入的个体,他们在踝关节跖屈力矩的产生中也具有更好的肢体间对称性,这也导致了步态不对称[24]。基于这种下行的控制,可以利用各种与运动控制相关的康复干预来恢复推进力。另一方面,脑卒中后除皮质脊髓束外,其他非皮质脊髓通路的受损与推进力的下降相关,如小脑与皮质间的通路、网状脊髓束[25-26]。此外,非损伤侧的皮质可能存在与脑卒中后活动相关的代偿性调节活动,但这种代偿性调节在其整体行走功能中起到的作用还未知。 既往研究还提出,在合作的双侧运动中存在大脑半球之间的“神经耦合”,即健侧大脑半球参与患侧的运动控制可能更加强烈[27],例如在进行打开瓶子或切面包这种动作时。在步行的合作运动中,可能也存在这种半球之间的“神经耦合”。基于这种两个半球共同控制的合作运动模式,单独对偏瘫侧、健侧进行辅助或者对两侧同时进行辅助的结果可能会有所不同。 总之,皮质脊髓束、小脑与皮质间的通路以及网状脊髓束的受损与推进力下降及步态不对称性相关,但推进力缺陷与神经控制通路之间的关系需要进一步研究。 2.2 推进力与步态的关系 2.2.1 推进力与正常步态的稳定性 正常的推进力对步态的稳定性起到重要作用。正常的步态受各种生物力学因素影响,高级中枢控制下行通路调节肌肉活动以满足正常活动的条件,让步行趋向高效和稳定。研究表明,前后地面反作用力的大小、下肢推进和制动的时间点是评价步态稳定性的重要指标[28]。在每个步态周期中,当一侧肢体与身体前方的地面接触支撑时,此时进行支撑的足底会产生制动力来保持平衡,为了使身体正常地进入下一个周期,则需要协调推进力产生的时间和大小[29-30]。损伤和疾病会打破这种协调能力,导致推进力缺陷并进一步产生严重的步态异常[31]。一项研究提到,当个体处于行走的运动状态时,无论此刻处于单腿支撑期或是双腿支撑期,足底受力的压力中心点必须在支撑面内才能保持平衡,推进力为行走时稳定的关键因素[32]。 2.2.2 改善推进力维持步态稳定性 维持步态稳定性需要一定强度的推进力。过去的研究表明个体通过放慢步行速度,可以获得更多行走时的动态稳定性[33]。而另一项研究发现行走时的推进力与行走速度呈正相关[34],这两项研究的结果似乎间接说明可以通过降低推进力以减慢行走速度来最终达到提高步态稳定性的目的。但一项研究表明降低推进力对步态稳定性是不利的,与行走速度较慢时得到的改善相反的是,推进力减小时的步行会使步态稳定性降低32%[35]。这可能是由于在支撑末期即将摆动时,推进力的不足导致患侧下肢摆动距离减少,在对侧下肢到达支撑末期时失去了一部分的被动伸髋角度,影响了下一阶段的推进力产生导致的,双足支撑时的支撑面也因此减小,影响平衡。这些结果提示,推进力减弱对步态稳定性的影响是消极的。另一项研究也表明了类似观点,年轻人在他们最舒适的速度下不需要减速,保持一定强度的推进力更能提高步态稳定性[36]。 2.2.3 推进力与步态对称性 步态的不对称是脑卒中患者行走的特点,这种不对称是由于患侧肢体的运功功能障碍和由此产生的健侧肢体代偿活动[37]。步长对称性在一定程度上代表了步态对称性,文章首先针对步长对称性进行了讨论。一项关于推进力和步长对称性的研究中,3/4的受试者在步行时表现出步长不对称:患侧下肢步长远小于健侧下肢,且这些受试者的患侧推进力大于其他受试者[38]。这表明偏瘫患者的步长对称性可能和偏瘫侧推进力大小呈负相关,患侧下肢增大的推进力导致了步长的不对称。另一项研究表达了相似的观点:仅在患侧下肢给予帮助,患者的两侧步长会同时增加,即患侧和健侧的步长还是无法对称,这对步长对称性的改善没有帮助[1]。但相反的是,最近的研究表明患侧下肢推进力的改善带动了步长对称性的提高[16,18]。推进力与步长对称性的关系仍存在争议。此外,一项研究以推进力、步长、摆动前期足底离地的间隙、骨盆的旋转及躯干的运动等因素作为研究步态对称性的参考变量[39],这说明步态对称性的考量除推进力和步长对称性外,也应纳入躯干运动。例如,一项既往研究表明,躯干位移和前侧下肢足位置的不对称性共同影响了整体步长不对称性,其中躯干位移是指健患侧下肢迈步时躯干向前的移动;前侧足位置是指位于身前的一侧足相对于躯干的位置,与髋屈肌带来的下肢摆动相关[40]。而健侧下肢迈步时躯干位移的减弱可能是由于偏瘫患者的推进力缺陷导致的[6],在这项研究中还发现,10名受试者中有6名表现出患侧比健侧具有更大的步长,他们的患侧下肢迈步时躯干位移也更大,这表明由髋屈肌带来更长的摆动相可能使患者的患侧推进力更多。 因此,推进力是维持步态稳定性的关键因素,推进力缺陷导致了稳定性的下降。而步态对称性与推进力、步长对称性、躯干位移和下肢摆动能力相关,各因素之间也存在可以互相影响的线性关系,因此为了更全面地评估步态对称性需要包含这几个因素。 2.2.4 以推进力作为步态评价指标 将推进力作为评估患者步态的指标更利于患者功能的长远发展。在临床上,脑卒中后个体的步态通常受损,限制其功能活动,影响了生活质量[41]。目前针对偏瘫患者步态的临床评估主要基于临床医生的观察和临床量表评估,对脑卒中严重程度的评估则基于患者的病史和检查[42]。据既往研究表明,在康复期间,动态负载能力和动态推进能力可用于量化评价患者的步态改善,它们通过三维步态分析仪来测量[4]。动态负载能力被计算为地面反作用力垂直分量的平均值,即一侧肢体的承重能力。动态推进能力被计算为地面反作用力水平方向的分量平均值,即一侧肢体的推进能力[43]。动态的量化评估结果使得治疗师对患者实际的功能改善情况有更加清晰的认识,纠正患者由代偿性步态带来的暂时性的“恢复”,使患者的步态有更长远的发展[4]。将行走速度、行走距离等作为评价指标将会忽视由代偿带来的步态问题,例如在偏瘫患者中,通过康复干预只提高了患侧肢体自身的表现或者利用设备使健侧肢体具有更大推进力来带动整体的行走速度,但异常步态模式在后续康复进程中更加固定,限制了患者行走的发展潜力[44-45]。而另一项研究也表明患者从治疗中获得的功能恢复来源于推进力的改善,并指出推进力的改善程度与患者的推进力基线水平有关[46]。以推进力为指标的行走可能才是康复的目标,几项最近研究都表达了这一观点[47-49]。 因此,推进力自身可以作为量化偏瘫患者步态的指标,且以推进力评价患者的步态更有利于长远的行走功能恢复。 2.3 改善推进力的康复技术 面对偏瘫患者的异常步态,临床上常采取被动矫形器帮助患者恢复行走能力,例如常见的刚性踝关节矫形器,它改善了行走时的足下垂现象,然而这种刚性的矫形器同时也限制了患者正常的跖屈功能,降低了推进力,最终导致髋关节进行代偿的异常步态[50]。目前用于改善推进力的最新康复技术主要包括外骨骼机器人辅助训练、基于跑步机的步行训练、生物反馈技术和全身振动训练等[51-59]。改善行走时推进力的主要措施见表1,所有的研究中都未见报道不良反应,安全性高。"
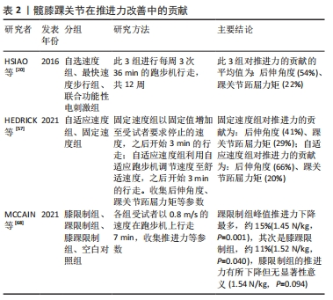
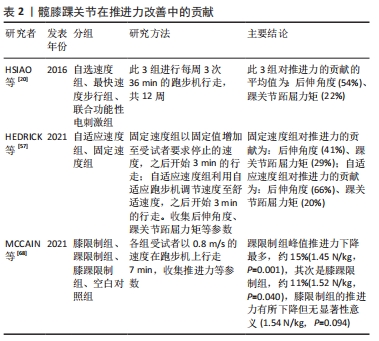
2.3.1 下肢外骨骼机器人对推进力的改善 下肢外骨骼机器人改善推进力的治疗思路是机器人在患者行走过程中提供髋膝踝关节相关的辅助以促进正常的推进,这种外界刺激的输入诱发了有关肌肉的激活,是脑卒中患者改善运动功能的前提条件,随着患者主动参与的增多,逐渐减少辅助以恢复推进力相关的神经肌肉通路,改善推进力[60]。 下肢外骨骼机器人通常为刚性结构,由与下肢各个关节、肢体长轴平行的刚性材料组成基本框架,使用各种与关节、肢体位置角度、肌肉收缩和力矩等相关的传感器,收集来自患者的实时数据,通过中央处理器分析后控制机体实现对患者的辅助[61]。由于其刚性特征,患者能在行走时保持被动稳定,为患者提供了合适的TLA和跖屈力矩以固定的正常步态行走,适合严重推进力缺陷的偏瘫患者。例如,最近的一项研究纳入了80例仅具备治疗性步行能力的脑卒中患者,对照组进行传统步行训练,试验组则使用下肢外骨骼机器人辅助髋、膝、踝关节进行训练,试验组受试者患侧峰值推进力明显改善(21%),与治疗前及对照组间具有显著性差异(P < 0.05)[54]。 柔性外骨骼是一种类似服装的可穿戴机器人,由具有集成传感和驱动功能的功能性纺织品组成,大都采用鲍登缆绳进行动力的传输[62],区别于刚性外骨骼机器人,其柔软、轻便且非限制性的人机接触允许其在动力和非动力模式下与患者进行自然的交互[63],可根据个人的行走表现逐渐调整辅助力度,提供精确的驱动[64],相对穿戴刚性外骨骼来说患者失去了更好的支撑,但有更多的主动参与,适合具有一定行走能力的患者。既往研究也表明穿戴柔性外骨骼的步行训练能够显著提高偏瘫患者的推进力、步行速度和步行距离[56,65]。另一方面,目前大多数的柔性外骨骼机器人都是辅助单一关节例如踝关节[66]。现有技术不支持同时穿戴多个的关节辅助模块,这样的负重足以让患者的跌倒风险大大增加,柔性外骨骼机器人的质量、个性化辅助及便携性是需要关注的问题[67]。基于此,文章对比了下肢髋膝踝各关节在推进力改善中的贡献,为临床和未来的设备研究提供理论支持。 既往研究大都纳入具有家庭性行走能力的偏瘫患者或健康人,文章搜集了这些研究并比较推进力的改善中髋、膝、踝关节的贡献。一项既往研究中受试者的髋关节后伸正常,当限制踝关节的运动时,无论膝关节是否受到限制,都观察到患者的峰值推进力降低,其中限制踝关节时降低了15%;相比之下,仅仅膝关节受到限制时不会导致峰值推进力显著降低[68]。对于膝关节受限制时推进力并无显著减少,研究者并未做出解释,可能是对于膝关节的限制一定程度上代替了伸膝,维持了良好的运动学位置以提供相当程度推进力。此外,HEDRICK等[57]对比了TLA和踝关节跖屈力矩在推进力增加当中的贡献,发现TLA是推进力增加的主要因素,TLA与踝关节力矩对推进力增加的贡献分别为60%和22%,剩余的贡献被归纳为TLA和跖屈力矩的共同作用及踝关节力臂,先前的研究也证明了类似的结果[20]。这表明改善与髋、膝伸肌相关的TLA对推进力的帮助更有意义。 因此,刚性下肢外骨骼机器人更适合推进力缺陷严重的偏瘫患者,柔性下肢外骨骼适合具有一定行走能力但仍需要改善推进力的患者。而髋膝踝关节在推进力改善中的具体贡献及作用机制仍存在争议,但可以肯定是髋、踝关节的贡献更大。未来的柔性外骨骼设备可以重点考虑基于髋、踝关节的多模块设备。由于脑卒中患者之间的个体差异,限制健康人关节对比峰值推进力大小是值得借鉴的研究方法,之后的研究可以在现有基础上多加入组别,以比较出髋、膝、踝关节的具体贡献。髋膝踝关节在推进力改善中的贡献见表2。"
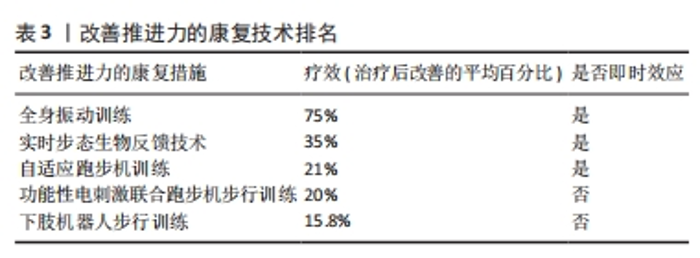
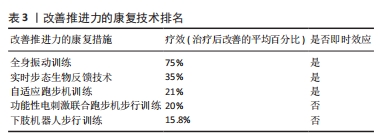
2.3.2 基于跑步机的步行训练对推进力的改善 自适应速度跑步机训练在近些年被用于增加健康人的推进力。自适应速度跑步机利用了一组基于惯性力、步态参数和位置的控制器,实现了基于使用者行走实时状态的速度控制。一些研究表明,与定速跑步机相比,健康人在自适应速度跑步机上行走时具有更快的行走速度并且推进力改善更多(17%、25%)[47,57]。 但该疗法作用于脑卒中患者的疗效缺少证据,仅有一项研究让偏瘫患者在自适应速度跑步机上完成了一次的10 m步行训练,其患侧下肢的TLA有了较明显的改善,整体的推进力改善不显著[69]。这一疗法需要更多的临床试验来验证其改善偏瘫患者推进力的疗效。 将跑步机训练结合功能性电刺激的联合干预方法已经得到了广泛的研究。相比于传统的刚性踝关节矫形器,功能性电刺激联合步行训练可能更适合偏瘫患者,功能性电刺激在步行期间诱发肌肉收缩以辅助行走。例如针对跖屈肌进行刺激来协助推进、针对背屈肌来减少患侧肢体摆动期的足下垂[70]。功能性电刺激不限制踝关节足跖屈,更适合具有恢复推进功能潜力的个体。既往研究表明利用功能性电刺激刺激跖屈肌与跑步机行走的组合是增加患侧推进力的有效方法[20]。一项最近的随机对照临床试验检查了这种联合训练方法的疗效,共有106例患者被纳入,其中联合训练组的53名受试者进行8周的训练后患侧峰值推进力均较治疗前增加了23%(P < 0.05),且优于常规训练组,这表明跑步机联合功能性电刺激的训练方法改善推进力相对于常规疗法是更有效的[59]。需要注意的是,由于推进力缺陷是复杂的,患者的推进力基线差异可能会使推进力的改善具有较大区别,在一些临床研究中也发现个别的受试者出现与大体趋势差异较大的结果[63]。例如RAY等[71]使用功能性电刺激联合跑步机训练对纳入的16例偏瘫患者进行为期12周的治疗,但治疗后患者平均推进力只提高了体质量的0.72%,并没有显著提高,这与既往研究的结果相反,作者也对此也做出了与文章类似的解释。 2.3.3 实时步态生物反馈对推进力的改善 实时步态生物反馈是一种为正在进行任务的使用者反馈及时准确信息的训练,可以诱导患者步态参数的改变,从而改善推进力[58]。既往研究大都是针对AGRF和TLA的实时生物反馈,即将患者完成任务时的AGRF或TLA数值以视觉或听觉的形式反馈。在几项研究中纳入健康人作为受试对象,他们在行走的同时接受AGRF或TLA实时生物反馈后,目标下肢的推进力均得到了显著改善[52,58]。其中一项研究选择脑卒中患者作为受试对象也表现出显著改善,患者的患侧峰值推进力改善了30%[53]。实时步态生物反馈是一种可行的步态训练策略,对脑卒中偏瘫患者的推进力缺陷改善具有前景,但未来需要更多的临床证据来进一步验证。 2.3.4 全身振动训练对推进力的改善 作者在检索过程中发现了一项有关于全身振动训练改善脑卒中患者步态的研究。这项研究将纳入的14例脑卒中患者完成一次10 min的全身振动训练,之后利用三维步态分析仪检测了训练前后包含推进力在内的几项步态参数,结果显示峰值推进力(75%)和摆动相时间百分比均改善(P < 0.05)[55]。这可能是由于振动训练作为一种外界刺激刺激了脑卒中患者足部的感受器,增加了肌肉的收缩导致的。此外,偏瘫患者的髋屈肌无力由此得到的改善可能是摆动相占比增多的原因,这也从另一角度解释了推进力的改善,即前文提到的患侧下肢摆动相占比增多可能带来更多的患侧推进力。有关全身振动训练改善推进力的相关研究不足,且目前的研究纳入的样本量较少,有关该康复技术的疗效有待之后的研究者进一步验证。 因此,目前改善推进力的临床研究都仅证明了其短期的有效性,缺乏长期疗效的验证,其中自适应跑步机技术以及生物反馈技术改善偏瘫患者推进力的相关研究也较少,这两方面需要未来研究者进一步的探索。另外,由于脑卒中患者的个体间差异,患者对同一康复技术的反应也有较大差异,对患者进行个性化的治疗将更高效[1,51]。为了让读者快速比较改善推进力的主要措施,文章从有效性和疗效是否即时效应这2方面对这些主要措施进行排名;有效性根据各康复措施对推进力改善的平均百分比来判定,是否即时效应根据各康复措施的疗效是否只是单次短时间干预的结果来判定,其中全身振动训练和生物反馈技术疗效最好,见表3。"
| [1] PAN YT, KANG I, JOH J, et al. Effects of bilateral assistance for hemiparetic gait post-stroke using a powered hip exoskeleton. Ann Biomed Eng. 2023; 51(2):410-421. [2] LIU K, YIN M, CAI Z. Research and application advances in rehabilitation assessment of stroke. J Zhejiang Univ Sci B. 2022;23(8):625-641. [3] BOYNE P, BILLINGER SA, REISMAN DS, et al. Optimal intensity and duration of walking rehabilitation in patients with chronic stroke: a randomized clinical trial. JAMA Neurol. 2023;80(4):342-351. [4] MAZZOLI D, BASINI G, PRATI P, et al. Indices of loading and propulsive ability in the gait of patients with chronic stroke with equinus foot deviation: a correlation study. Front Hum Neurosci. 2022;15:771392. [5] SAUDER NR, MEYER AJ, ALLEN JL, et al. Computational design of fastfes treatment to improve propulsive force symmetry during post-stroke gait: a feasibility study. Front Neurorobot. 2019;13:80. [6] BOWDEN MG, BALASUBRAMANIAN CK, NEPTUNE RR, et al. Anterior-posterior ground reaction forces as a measure of paretic leg contribution in hemiparetic walking. Stroke. 2006;37(3):872-876. [7] KWAKKEL G, LANNIN NA, BORSCHMANN K, et al. Standardized measurement of sensorimotor recovery in stroke trials: consensus-based core recommendations from the stroke recovery and rehabilitation roundtable. Neurorehabil Neural Repair. 2017;31(9):784-792. [8] 张达,钱竞光.脑卒中偏瘫患者步态动力学分析的研究进展[J].湖北体育科技,2021,40(7):641-645,649. [9] SLOOT L, BAE J, BAKER L, et al. O 089 - A soft robotic exosuit assisting the paretic ankle in patients post-stroke: effect on muscle activation during overground walking. Gait Posture. 2022;95:217-218. [10] ELFTMAN H. The measurement of the external force in walking. Science. 1938;88(2276):152-153. [11] NILSSON J, THORSTENSSON A. Ground reaction forces at different speeds of human walking and running. Acta Physiol Scand. 1989;136(2):217-227. [12] CAPPOZZO A, CATANI F, CROCE UD, et al. Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin Biomech (Bristol, Avon). 1995;10(4):171-178. [13] NEPTUNE RR, KAUTZ SA, ZAJAC FE. Contributions of the individual ankle plantar flexors to support, forward progression and swing initiation during walking. J Biomech. 2001;34(11):1387-1398. [14] PETERSON CL, CHENG J, KAUTZ SA, et al. Leg extension is an important predictor of paretic leg propulsion in hemiparetic walking. Gait Posture. 2010;32(4):451-456. [15] CHEN G, PATTEN C, KOTHARI DH, et al. Gait differences between individuals with post-stroke hemiparesis and non-disabled controls at matched speeds. Gait Posture. 2005;22(1):51-56. [16] SOMBRIC CJ, TORRES-OVIEDO G. Augmenting propulsion demands during split-belt walking increases locomotor adaptation of asymmetric step lengths. J Neuroeng Rehabil. 2020;17(1):69. [17] 宋和胜,钱竞光,唐潇.基于软件OpenSim的人体运动建模理论及其应用领域概述[J].医用生物力学,2015,30(4):373-379. [18] SWAMINATHAN K, PORCIUNCULA F, PARK S, et al. Ankle-targeted exosuit resistance increases paretic propulsion in people post-stroke. J Neuroeng Rehabil. 2023;20(1):85. [19] SANTUCCI V, ALAM Z, LIU J, et al. Immediate improvements in post-stroke gait biomechanics are induced with both real-time limb position and propulsive force biofeedback. J Neuroeng Rehabil. 2023;20(1):37. [20] HSIAO H, KNARR BA, POHLIG RT, et al. Mechanisms used to increase peak propulsive force following 12-weeks of gait training in individuals poststroke. J Biomech. 2016;49(3):388-395. [21] ALLEN JL, KAUTZ SA, NEPTUNE RR. Step length asymmetry is representative of compensatory mechanisms used in post-stroke hemiparetic walking. Gait Posture. 2011;33(4):538-543. [22] DENG W, LIN M, YU S, et al. Effects of hip joint angle on quadriceps recruitment pattern during knee extension in healthy individuals: analysis by ultrasound-based shear-wave elastography. Front Physiol. 2022;13: 836435. [23] LIU Z, XIN H, CHOPP M. Axonal remodeling of the corticospinal tract during neurological recovery after stroke. Neural Regen Res. 2021;16(5):939-943. [24] PALMER JA, HSIAO H, AWAD LN, et al. Symmetry of corticomotor input to plantarflexors influences the propulsive strategy used to increase walking speed post-stroke. Clin Neurophysiol. 2016;127(3):1837-1844. [25] CECATTO RB, BATTISTELLA LR. Improving motor recovery after cortical stroke using cerebellar non-invasive transcranial stimulation. Minerva Med. 2021;112(3):409-411. [26] SRIVASTAVA S, SEAMON BA, MAREBWA BK, et al. The relationship between motor pathway damage and flexion-extension patterns of muscle co-excitation during walking. Front Neurol. 2022;13:968385. [27] THOMAS FA, DIETZ V, SCHRAFL-ALTERMATT M. Automatic gain control of neural coupling during cooperative hand movements. Sci Rep. 2018; 8(1):5959. [28] REVI DA, ALVAREZ AM, WALSH CJ, et al. Indirect measurement of anterior-posterior ground reaction forces using a minimal set of wearable inertial sensors: from healthy to hemiparetic walking. J Neuroeng Rehabil. 2020; 17(1):82. [29] KUHMAN D, HURT CP. The timing of locomotor propulsion in healthy adults walking at multiple speeds. Hum Mov Sci. 2019;68:102524. [30] HU Z, REN L, HU D, et al. Speed-related energy flow and joint function change during human walking. front bioeng biotechnol. 2021;9:666428. [31] ACUñA SA, TYLER ME, THELEN DG. Individuals with chronic mild-to-moderate traumatic brain injury exhibit decreased neuromuscular complexity during gait. Neurorehabil Neural Repair. 2022;36(4-5):317-327. [32] 谢哲东,李斌,陈晨,等.基于ZMP理论的下肢外骨骼机器人稳定性分析[J].机械工程师,2022(5):1-5. [33] AWAD LN, KNARR BA, KUDZIA P, et al. The interplay between walking speed, economy, and stability after stroke. J Neurol Phys Ther. 2023;47(2):75-83. [34] LIANG JN, HO KY, LEE YJ, et al. Slow walking in individuals with chronic post-stroke hemiparesis: speed mediated effects of gait kinetics and ankle kinematics. Brain Sci. 2021;11(3):365. [35] HAK L, HOUDIJK H, BEEK PJ, et al. Steps to take to enhance gait stability: the effect of stride frequency, stride length, and walking speed on local dynamic stability and margins of stability. PLoS One. 2013;8(12):e82842. [36] BROWNE MG, FRANZ JR. Does dynamic stability govern propulsive force generation in human walking? R Soc Open Sci. 2017;4(11):171673. [37] LORA-MILLAN JS, SANCHEZ-CUESTA FJ, ROMERO JP, et al. A unilateral robotic knee exoskeleton to assess the role of natural gait assistance in hemiparetic patients. J Neuroeng Rehabil. 2022;19(1):109. [38] BALASUBRAMANIAN CK, BOWDEN MG, NEPTUNE RR, et al. Relationship between step length asymmetry and walking performance in subjects with chronic hemiparesis. Arch Phys Med Rehabil. 2007;88(1):43-49. [39] KEMPEN JC, DOORENBOSCH CA, KNOL DL, et al. Newly identified gait patterns in patients with multiple sclerosis may be related to push-off quality. Phys Ther. 2016;96(11):1744-1752. [40] ROERDINK M, BEEK PJ. Understanding inconsistent step-length asymmetries across hemiplegic stroke patients: impairments and compensatory gait. Neurorehabil Neural Repair. 2011;25(3):253-258. [41] FELIUS RAW, GEERARS M, BRUIJN SM, et al. Reliability of IMU-based gait assessment in clinical stroke rehabilitation. Sensors (Basel). 2022;22(3):908. [42] YAMAMOTO R, SASAKI S, KUWAHARA W, et al. Effect of exoskeleton-assisted body weight-supported treadmill training on gait function for patients with chronic stroke: a scoping review. J Neuroeng Rehabil. 2022;19(1):143. [43] CAMPANINI I, MERLO A. Reliability, smallest real difference and concurrent validity of indices computed from GRF components in gait of stroke patients. Gait Posture. 2009;30(2):127-131. [44] ROWLAND DM, LEWEK MD. Linking gait mechanics with perceived quality of life and participation after stroke. PLoS One. 2022;17(9):e0274511. [45] ALINGH JF, GROEN BE, KAMPHUIS JF, et al. Task-specific training for improving propulsion symmetry and gait speed in people in the chronic phase after stroke: a proof-of-concept study. J Neuroeng Rehabil. 2021; 18(1):69. [46] HSIAO H, HIGGINSON JS, BINDER-MACLEOD SA. Baseline predictors of treatment gains in peak propulsive force in individuals poststroke. J Neuroeng Rehabil. 2016;13:2. [47] DONLIN MC, PARISER KM, DOWNER KE, et al. Adaptive treadmill walking encourages persistent propulsion. Gait Posture. 2022;(93):246-251. [48] STRAMEL DM, WINTERBOTTOM L, STEIN J, et al. Overground robotic gait trainer mTPAD improves gait symmetry and weight bearing in stroke survivors. Bioengineering (Basel). 2023;10(6):698. [49] PARISER KM, DONLIN MC, DOWNER KE, et al. Adaptive treadmill control can be manipulated to increase propulsive impulse while maintaining walking speed. J Biomech. 2022;133:110971. [50] YAMAMOTO S, MOTOJIMA N, KOBAYASHI Y, et al. Ankle-foot orthosis with an oil damper versus nonarticulated ankle-foot orthosis in the gait of patients with subacute stroke: a randomized controlled trial. J Neuroeng Rehabil. 2022;19(1):50. [51] AWAD LN, BAE J, O’DONNELL K, et al. A soft robotic exosuit improves walking in patients after stroke. Sci Transl Med. 2017;9(400):eaai9084. [52] SCHENCK C, KESAR TM. Effects of unilateral real-time biofeedback on propulsive forces during gait. J Neuroeng Rehabil. 2017;14(1):52. [53] GENTHE K, SCHENCK C, EICHOLTZ S, et al. Effects of real-time gait biofeedback on paretic propulsion and gait biomechanics in individuals post-stroke. Top Stroke Rehabil. 2018;25(3):186-193. [54] 雷德宝,吴校林,朱锐,等.下肢机器人训练对脑卒中偏瘫患者三维步态分析系统测试结果的影响[J].临床和实验医学杂志,2019,18(12): 1323-1327. [55] 赵秦,魏慧,王威,等.全身振动训练对脑卒中患者步态的影响[J].中国康复医学杂志,2020,35(6):676-681. [56] PORCIUNCULA F, BAKER T C, ARUMUKHOM REVI D, et al. Targeting paretic propulsion and walking speed with a soft robotic exosuit: a consideration-of-concept trial. Front Neurorobot. 2021;15:689577. [57] HEDRICK EA, PARKER SM, HSIAO H, et al. Mechanisms used to increase propulsive forces on a treadmill in older adults. J Biomech. 2021;115: 110139. [58] LIU J, SANTUCCI V, EICHOLTZ S, et al. Comparison of the effects of real-time propulsive force versus limb angle gait biofeedback on gait biomechanics. Gait Posture. 2021;83:107-113. [59] 马启寿,廖燕锬,李中元,等.FES辅助跑步机训练提高脑卒中下肢偏瘫患者步行能力的研究[J].按摩与康复医学,2022,13(14):22-25, 28. [60] GASSERT R, DIETZ V. Rehabilitation robots for the treatment of sensorimotor deficits: a neurophysiological perspective. J Neuroeng Rehabil. 2018;15(1):46. [61] ESQUENAZI A, TALATY M, PACKEL A, et al. The ReWalk powered exoskeleton to restore ambulatory function to individuals with thoracic-level motor-complete spinal cord injury. Am J Phys Med Rehabil. 2012;91(11):911-921. [62] CHEN L, CHEN C, WANG Z, et al. A novel lightweight wearable soft exosuit for reducing the metabolic rate and muscle fatigue. Biosensors (Basel). 2021;11(7):215. [63] SLOOT LH, BAKER LM, BAE J, et al. Effects of a soft robotic exosuit on the quality and speed of overground walking depends on walking ability after stroke. J Neuroeng Rehabil. 2023;20(1):113. [64] DING Y, KIM M, KUINDERSMA S, et al. Human-in-the-loop optimization of hip assistance with a soft exosuit during walking. Sci Robot. 2018;3(15): eaar5438. [65] AWAD LN, KUDZIA P, REVI D A, et al. Walking faster and farther with a soft robotic exosuit: Implications for post-stroke gait assistance and rehabilitation. IEEE Open J Eng Med Biol. 2020;(1):108-115. [66] SIVIY C, BAKER L M, QUINLIVAN B T, et al. Opportunities and challenges in the development of exoskeletons for locomotor assistance. Nat Biomed Eng. 2023;7(4):456-472. [67] MORRIS L, DITEESAWAT RS, RAHMAN N, et al. The-state-of-the-art of soft robotics to assist mobility: a review of physiotherapist and patient identified limitations of current lower-limb exoskeletons and the potential soft-robotic solutions. J Neuroeng Rehabil. 2023;20(1):18. [68] MCCAIN EM, LIBERA TL, BERNO ME, et al. Isolating the energetic and mechanical consequences of imposed reductions in ankle and knee flexion during gait. J Neuroeng Rehabil. 2021;18(1):21. [69] RAY NT, REISMAN DS, HIGGINSON JS. Walking speed changes in response to user-driven treadmill control after stroke. J Biomech. 2020;(101):109643. [70] JAQUELINE DA, CUNHA M, RECH KD, et al. Functional electrical stimulation of the peroneal nerve improves post-stroke gait speed when combined with physiotherapy. A systematic review and meta-analysis. Ann Phys Rehabil Med. 2021;64(1):101388. [71] RAY NT, REISMAN DS, HIGGINSON JS. Combined user-driven treadmill control and functional electrical stimulation increases walking speeds poststroke. J Biomech. 2021;124:110480. |
| [1] | Li Zhifei, Yang Yin, Chen Hualong, Liang Qinqiu, Zhong Yuanming, Zhang Yisheng. Finite element analysis of the correlation between tilt angle of titanium cage and postoperative subsidence of titanium cage after anterior subtotal cervical corpectomy, decompression and fusion [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(9): 1313-1319. |
| [2] | Chen Mengmeng, Bao Li, Chen Hao, Jia Pu, Feng Fei, Shi Guan, Tang Hai. Biomechanical characteristics of a novel interspinous distraction fusion device BacFuse for the repair of lumbar degenerative disease [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(9): 1325-1329. |
| [3] | Liang Cheng, Zhang Linqi, Wang Guan, Li Wen, Duan Ke, Li Zhong, Lu Xiaobo, Zhuo Naiqiang. Finite element and biomechanical analysis of different implants in repair for unilateral unstable pelvic posterior ring injury [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(9): 1336-1341. |
| [4] | Yang Junliang, Lu Tan, Xu Biao, Jiang Yaqiong, Wang Fucheng. Three-dimensional finite element analysis of effects of partial anterior cruciate ligament rupture on knee joint stress [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(9): 1347-1353. |
| [5] | Li Yongjie, Fu Shenyu, Xia Yuan, Zhang Dakuan, Liu Hongju. Correlation of knee extensor muscle strength and spatiotemporal gait parameters with peak knee flexion/adduction moment in female patients with knee osteoarthritis [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(9): 1354-1358. |
| [6] | Wu Jing, Yao Yingce, Yang Xiaowei, Xue Boshi, Zhao Jianbin, Yang Chen, Luan Tianfeng, Zhou Zhipeng. Intervention of muscle strength training combined with neuromuscular electrical stimulation on lower limb function and biomechanical changes in patients with patellofemoral pain [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(9): 1365-1371. |
| [7] | Qi Haodong, Lu Chao, Xu Hanbo, Wang Mengfei, Hao Yangquan. Effect of diabetes mellitus on perioperative blood loss and pain after primary total knee arthroplasty [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(9): 1383-1387. |
| [8] | Yu Weijie, Liu Aifeng, Chen Jixin, Guo Tianci, Jia Yizhen, Feng Huichuan, Yang Jialin. Advantages and application strategies of machine learning in diagnosis and treatment of lumbar disc herniation [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(9): 1426-1435. |
| [9] | Weng Rui, Lin Dongxin, Guo Haiwei, Zhang Wensheng, Song Yuke, Lin Hongheng, Li Wenchao, Ye Linqiang. Abnormal types of intervertebral disc structure and related mechanical loading with biomechanical factors [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(9): 1436-1442. |
| [10] | Zhang Xihui, Li Zhengrong, Li Shineng, Xing Zengyu, Wang Jiao. Effect of rehabilitation training guided by Pro-kin balance system on proprioception and balance function of the affected knee after anterior cruciate ligament reconstruction [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(8): 1259-1264. |
| [11] | Lin Zeyu, Xu Lin. Research progress in gout-induced bone destruction mechanism [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(8): 1295-1300. |
| [12] | Ma Shuwei, He Sheng, Han Bing, Zhang Liaoyun. Exosomes derived from mesenchymal stem cells in treatment of animals with acute liver failure: a meta-analysis [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(7): 1137-1142. |
| [13] | Wang Qiang, Li Shiyun, Xiong Ying, Li Tiantian. Biomechanical changes of the cervical spine in internal fixation with different anterior cervical interbody fusion systems [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(6): 821-826. |
| [14] | Wei Yuanbiao, Lin Zhan, Chen Yanmei, Yang Tenghui, Zhao Xiao, Chen Yangsheng, Zhou Yanhui, Yang Minchao, Huang Feiqi. Finite element analysis of effects of sagittal cervical manipulation on intervertebral disc and facet joints [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(6): 827-832. |
| [15] | Zhang Rui, Wang Kun, Shen Zicong, Mao Lu, Wu Xiaotao. Effects of endoscopic foraminoplasty and laminoplasty on biomechanical properties of intervertebral disc and isthmus [J]. Chinese Journal of Tissue Engineering Research, 2024, 28(6): 833-839. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||