Chinese Journal of Tissue Engineering Research ›› 2013, Vol. 17 ›› Issue (9): 1549-1554.doi: 10.3969/j.issn.2095-4344.2013.09.005
Previous Articles Next Articles
Intelligent prosthetic ankle based on the finite state machine control
Yang Peng1, Bai Jian1, Wang Xin-ran2, Geng Yan-li1
- 1 Control Science and Engineering College, Hebei University of Technology, Tianjin 300130, China
2 Control Science and Engineering College, Shandong University, Jinan 250100, Shandong Province, China
-
Received:2012-07-05Revised:2012-08-16Online:2013-02-26Published:2013-03-27 -
Contact:Bai Jian, Master, Control Science and Engineering College, Hebei University of Technology, Tianjin 300130, China bain3207@126.com -
About author:Yang Peng☆, Doctor, Professor, Control Science and Engineering College, Hebei University of Technology, Tianjin 300130, Chin
CLC Number:
Cite this article
Yang Peng, Bai Jian, Wang Xin-ran, Geng Yan-li. Intelligent prosthetic ankle based on the finite state machine control[J]. Chinese Journal of Tissue Engineering Research, 2013, 17(9): 1549-1554.
share this article
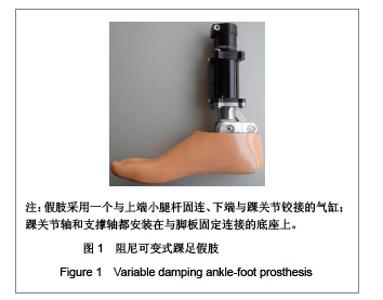
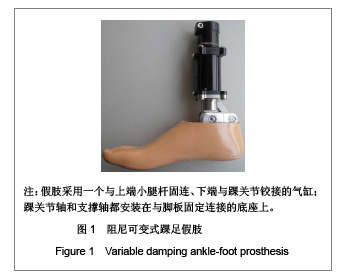
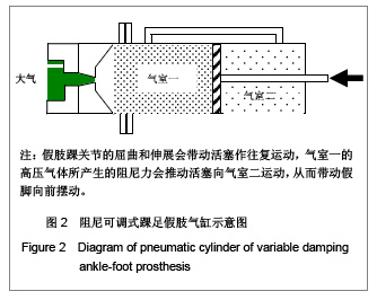
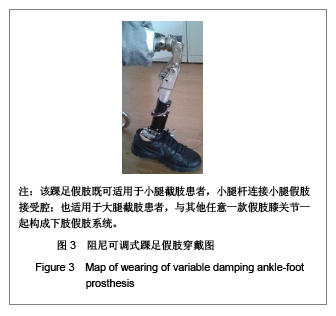
1 踝关节的结构设计 实验采用了阻尼可调式踝足假肢(清华大学研制,国家康复辅具中心精博加工厂加工),见图1,该假肢采用一个与上端小腿杆固连、下端与踝关节铰接的气缸;气缸活塞杆由活塞直杆和活塞斜杆铰接而成,活塞斜杆的末端与位于踝关节后方且平行于踝关节轴的支撑轴构成支撑铰链,踝关节轴和支撑轴都安装在与脚板固定连接的底座上。 气缸结构,见图2,假肢踝关节的屈曲和伸展会带动活塞作往复运动。当踝关节屈曲时,活塞在气缸内是向左运动的,此时气缸的气室一会产生高压气体。当假脚离地时,气室一的高压气体所产生的阻尼力会推动活塞向右运动,从而带动假脚向前摆动。在气缸尾部安装的直线步进电机专门用来控制针阀的大小,从而调节气室一与大气之间的气体流动,实现对踝关节屈曲伸展阻尼的控制[16-17]。 踝足假肢穿戴,见图3。假肢穿戴者在行走过程中,足跟着地进入支撑期时,储能弹簧吸收由活塞斜杆、活塞直杆传递来的冲击力,被压缩来储存能量。同时气缸上部安装的直线步进电机推动针阀逐渐减小与大气间气体的流通,从而增大气缸阻尼力,以提供足够的支撑力。在支撑期结束后,直线步进电机回退,针阀在针阀弹簧的作用下,逐渐增加与大气间气体的流通,从而减小气缸阻尼力,使踝关节转动灵活,使得踝关节的阻尼可以根据支撑期和摆动期可调。"
"

"
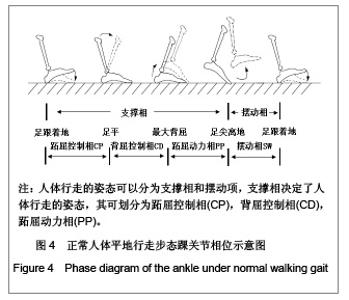
2 人体步态分析和有限状态机控制方法 2.1 相位划分 人体运动,以平地行走为例的步态周期可以被典型的定义为开始于足跟着地并结束于同侧足跟的再次着地,同时将步态分为支撑相,脚与地面接触阶段,约占整个周期的60%和摆动相,脚在空中摆动阶段,约占整个周期的40%。其中,支撑相决定了人体行走的姿态,是人体行走步态控制的主要环节,可以进一步将其划分为3个子相[18-19]:跖屈控制相(CP),背屈控制相(CD),跖屈动力相(PP),正常人体平地行走步态踝关节相位示意图,见图4。"
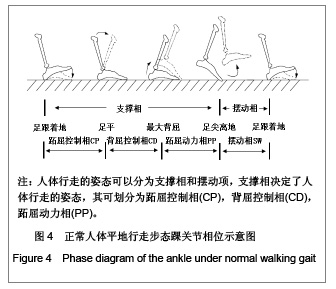

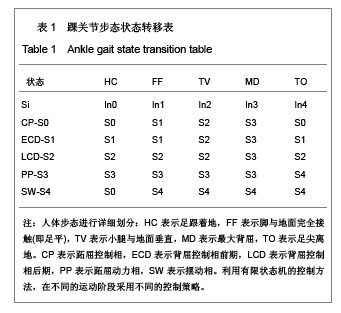
跖屈控制相:开始于足跟接触地面,至脚底完全接触地面(即足平)结束,这一过程踝关节主要起到缓冲作用。 背屈控制相:开始于跖屈控制相的末端,到踝关节最大背屈状态(即足跟即将离地时刻)结束。踝关节在背屈控制相阶段的主要作用是为下一相位提供身体向前向上的动力储存弹性能量。 跖屈动力相:开始于背屈控制相的末端,到脚尖离地时结束。跖屈动力相阶段释放了踝关节作为扭矩源在背屈控制相阶段储存的能量,为人体前行提供动力。 摆动相:开始于脚尖离地,到同侧足跟再次触地时结束。这一阶段踝关节使脚达到平衡状态,为足跟触地做好准备。 2.2 有限状态机控制方法 有限状态机是表示有限个状态以及在这些状态之间的转移和动作的数学模型。有限状态机的下一个状态是确定的。系统状态的改变取决于系统的输入和当前系统的状态。采用有限状态机进行步态控制的前提是神经运动系统以某种固定的方式来运转。这在下肢行走方面影响不大,下肢受伤或部分残缺不会影响步行习惯的改变[20-21]。 人体行走时具有重复运动的特性,即脚跟着地到同侧脚尖离地的支撑相约占整个步态周期的60%,脚尖离地到同侧脚跟着地的摆动相约占步态周期的40%,因此可将人体步态进行详细划分,利用有限状态机(FSM)的控制方法,在不同的运动阶段采用不同的控制策略。 将踝关节的步态进行详细规划,典型事件包括:HC表示足跟着地,FF表示脚与地面完全接触(即足平),TV表示小腿与地面垂直,MD表示最大背屈,TO表示足尖离地。典型步行状态包括:CP表示跖屈控制相,ECD表示背屈控制相前期,LCD表示背屈控制相后期,PP表示跖屈动力相,SW表示摆动相。有限状态机由变换函数和动作函数实现,变换函数为:"

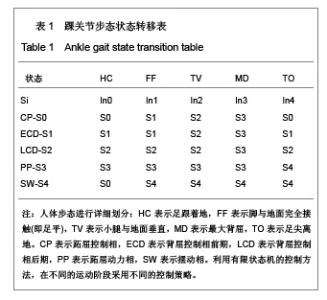
式中Si为当前步态状态,Si+1为接下来的步态状态,Ini为输入事件,即使状态发生变换的事件,In∈(HC,FF,MD,TO)。 。 动作函数为:"
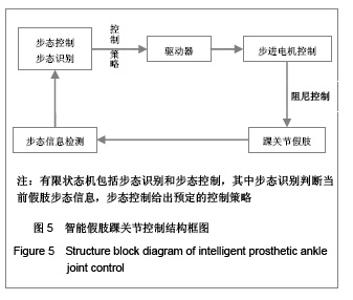
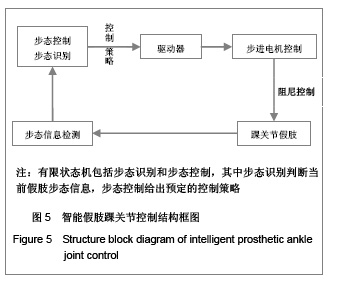
通过假肢踝关节上的电位计和足底的压力传感器可以进行状态转移的触发。在前脚掌和脚后跟对应位置处安装两个压力传感器,可以检测足跟着地、足平和足尖离地时刻。在假肢踝关节轴上同轴安装旋转电位计,可时刻检测到踝关节轴的旋转角度,这样就可以根据踝关节角度判断小腿与地面垂直、最大背屈时刻。 智能踝关节控制器通过安装在假肢上的传感器实时检测假肢踝关节的当前步态,根据有限状态机给出的控制策略驱动直线步进电机对踝足假肢进行阻尼控制[22]。有限状态机包括步态识别和步态控制,其中步态识别判断当前假肢步态信息,步态控制给出预定的控制策略,具体的控制结构图,见图5。"
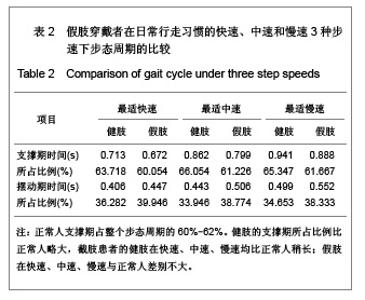
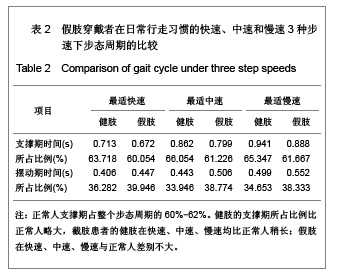
3 实验与分析 为了验证踝足假肢在有限状态机控制方法作用下的控制效果,纳入1例男性截肢者,25岁,体质量84 kg,身体健康,为国家康复辅具中心患者,对实验知情同意,符合医学伦理学标准,穿戴行走步行实验。首先,测试前由专业假肢安装技师对受试者进行安装调整,保证其穿戴的安全性和舒适性,避免装配问题对实验结果产生误差。其次,在更换智能假肢踝关节后,受试者要穿戴假肢适应一段时间。 采用Vicon三维光学运动捕捉系统对截肢者假肢侧和健肢侧的踝关节角度数据进行采集[23]。让假肢穿戴者在日常行走习惯的快速、中速和慢速下进行行走实验,每种情况均重复足够的次数,记录其在3种步速下步态周期各个阶段的时间,见表2。"
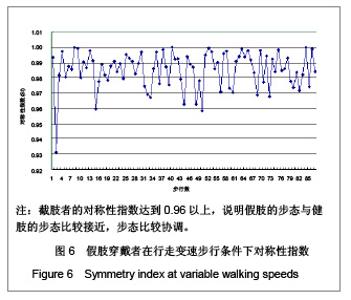
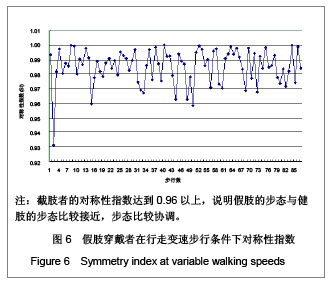
对于步态差别,用对称性指数进行衡量:其中Tz为健康人在自然状态下的行走步态周期;T为假肢穿戴者者步态周期;Zr为支撑期左右比(小/大);Mr为摆动期左右比(小/大)。对于步态完全对称的正常人来说,对称性指数Sr的值为1[24]。在测试者穿戴下肢假肢样机行走并且有意改变步行速度的情况下,测量假肢侧的步态周期,对所得到的数据进行对称性指数计算,对称性指数,见图6,从图中可以看出,实验结果达到了预期的目标,效果较好。"
| [1] Tan GZ, Wu LM. Jiqiren. 2001;23(1):91-96. 谭冠政,吴立明.国内外人工腿(假肢)研究的进展及发展趋势[J]. 机器人,2001,23(1):91-96.[2] Jin DW, Wang RC. Zhongguo Linchuang Kangfu. 2002;6(20): 2994-2995. 金德闻,王人成.人工智能假肢[J].中国临床康复,2002,6(20): 2994-2995.[3] Au SK, Dilworth P, Herr H. An ankle-foot emulation system for the study of human walking biomechanics. tics and Automation, 2006. ICRA 2006. Proceedings 2006 IEEE International Conference on. 2006:2939-2945.[4] Au SK, Weber J, Herr H. Biomechanical Design of a Powered Ankle-Foot Prosthesis. Rehabilitation Robotics, 2007. ICORR 2007. IEEE 10th International Conference on. 2007:298-303.[5] Eilenberg MF, Geyer H, Herr H. Control of a powered ankle-foot prosthesis based on a neuromuscular model. IEEE Trans Neural Syst Rehabil Eng. 2010;18(2):164-173.[6] Li CQ,Tokuda M,Furusho J, et al. Research and Development of the Intelligently-Controlled Prosthetic Ankle Joint. Mechatronics and Automation, Proceedings of the 2006 IEEE International Conference on. 2006:1114-1119.[7] Collins SH, Kuo AD. Recycling energy to restore impaired ankle function during human walking. PLoS One. 2010;5(2): e9307.[8] Au SK, Herr H, Weber J, et al. Powered ankle-foot prosthesis for the improvement of amputee ambulation. Conf Proc IEEE Eng Med Biol Soc. 2007;2007:3020-3026.[9] Au SK, Weber J, Herr H. Powered Ankle-Foot Prosthesis Improves Walking Metabolic Economy. Robotics, IEEE Transactions on. 2009:25(1):51-66. [10] Sup F, Bohara A, Goldfarb M. Design and Control of a Powered Knee and Ankle Prosthesis. Robotics and Automation, 2007 IEEE International Conference on. 2007: 4134-4139. [11] Versluys R, Matthys A, Van Ham R, et al. Powered ankle-foot system that mimics intact human ankle behavior: Proposal of a new concept. Biomedical Robotics and Biomechatronics, 2008. BioRob 2008. 2nd IEEE RAS & EMBS International Conference on.2009:658-662.[12] Xie HL, Cong DH, Wang BR, et al. Gongneng Cailiao. 2006; 5(37):799-804. 谢华龙,丛德宏,王斌锐,等. 用磁流变阻尼器控制异构双腿机器人的仿真研究[J]. 功能材料,2006,5(37):799-804.[13] Gao C, Wang BR, Xie HL, et al. Dongbei Daxue Xuebao(Ziran Kexueban). 2004;25(11):1030-1033. 高成,王斌锐,谢华龙,等. 异构双腿机器人仿生腿的设计与控制实现[J]. 东北大学学报:自然科学版,2004,25(11):1030-1033.[14] Wen L, Li MY, Yu HL, et al. Zhongguo Zuzhi Gongcheng Yanjiu yu Linchuang Kangfu. 2008;12(52):10317-10319. 文丽,郦鸣阳,喻洪流,等. 下肢假肢步态试验机的设计[J].中国组织工程研究与临床康复,2008,12(52):10317-10319.[15] Gong SY, Yang P, Song L, et al. Zhongguo Zuzhi Gongcheng Yanjiu Yu Linchuang Kangfu. 2010;14(13):2295-2298. 龚思远,杨鹏,宋亮,等. 基于迭代学习控制智能下肢假肢研制:实现了对健肢步速的跟随[J]. 中国组织工程研究与临床康复, 2010,14(13):2295-2298.[16] Gong SY,Yang P,Song L. Development of an Intelligent Prosthetic Knee Control System. Electrical and Control Engineering (ICECE), 2010 International Conference on. 2010:819-822.[17] Chen J, Qiu CQ, Liu Y, et al. Wuhan Ligong Daxue Xuebao(Xinxi yu Guanli Gongchengban). 2009;31(2):220-222. 陈静,邱长青,刘洋,等.主动式踝关节假肢的位置伺服系统研究[J]. 武汉理工大学学报(信息与管理工程版),2009,31(2):220-222.[18] Chen J, Liu Y, Qiu CQ, et al. Jisuan Jisu yu Zidonghua. 2008; 27(4):69-71. 陈静,刘洋,邱长青,等.主动式踝关节假肢运动轨迹的迭代学习控制[J]. 计算技术与自动化,2008,27(4):69-71.[19] Wang RC, Jin DW. Zhongguo Linchuang Kangfu. 2002;6(20): 3000-3019. 王人成,金德闻.步态分析在假肢设计中的应用[J].中国临床康复, 2002,6(20):3000-3019.[20] Powered ankle-foot prosthesis for the improvement of amputee walking economy. Massachusetts Institute of Technology. 2007:103-108.[21] Zhang TY, Li LF, Ji R, et al. Zhongguo Kangfu Lilun yu Shijian. 2010;16(3):293-295. 张腾宇,李立峰,季润,等.三维步态分析在截肢患者康复中的应用[J].中国康复理论与实践,2010,16(3):293-295.[22] Sup F, Bohara A, Goldfarb M. Design and Control of a Powered Transfemoral Prosthesis. Int J Rob Res. 2008; 27(2):263-273.[23] Martinez Villalpando, Ernesto Carlos. Estimation of ground reaction force and zero moment point on a powered ankle-foot prosthesis. Massachusetts Institute of Technology. 2006: 89-97.[24] Orendurff MS, Segal AD, Klute GK, et al. Gait efficiency using the C-Leg. J Rehabil Res Dev. 2006r;43(2):239-246.[25] Gong SY, Yang P, Liu QD, et al. Zhongguo Zuzhi Gongcheng Yanjiu yu Linchuang Kangfu. 2010;14(17):3109-3112. 龚思远,杨鹏,刘启栋,等.智能下肢假肢传感器的应用[J].中国组织工程研究与临床康复,2010,14(17):3109-3112.[26] He GH, Tan GZ, Zeng QD, et al. Jisuanji Celiang yu kongzhi. 2007;15(1):52-55. 贺光辉,谭冠政,曾庆冬,等.智能仿生人工腿位置伺服控制系统的设计[J]. 计算机测量与控制,2007,15(1):52-55.[27] Wang RC, Shen Q, Jin DW. Zhongguo Kangfu Yixue Zazhi. 2007;22(12):1093-1094. 王人成,沈强,金德闻.假肢智能膝关节研究进展[J].中国康复医学杂志,2007,22(12):1093-1094.[28] Chen LL,Yang P,Xu XY,et al. Above-knee prosthesis control based on posture recognition by support vector machine. 2008 IEEE International Conference on Robotics,Automation and Mechatronics.2008:307-312.[29] Wang BR, Xu XH. Kongzhi yu Juece. 2004;19(2):121- 127(133). 王斌锐,徐心和.智能仿生腿的研究[J].控制与决策,2004,19(2): 121-127(133).[30] Daniel Zlatnik,Beatrice Steiner,Gerhard Schweitzer. Finite-State Control of a Trans-Femoral(TF) Prosthesis. IEEE transactions on control systems technology.2002;10(3): 408-420.[31] Yu HL, Guan SY, Qian SS, et al. Zhongguo Kangfu Yixue Zazhi. 2008;23(2):145-147. 渝洪流,关慎远,钱省三,等.膝上假肢的智能控制方法[J].中国康复医学杂志,2008,23(2):145-147. |
| [1] | Wang Qisa, Lu Yuzheng, Han Xiufeng, Zhao Wenling, Shi Haitao, Xu Zhe. Cytocompatibility of 3D printed methyl acrylated hyaluronic acid/decellularized skin hydrogel scaffolds [J]. Chinese Journal of Tissue Engineering Research, 2026, 30(8): 1912-1920. |
| [2] | Zhong Caihong, Xiao Xiaoge, Li Ming, Lin Jianhong, Hong Jing. Biomechanical mechanism of sports-related patellar tendinitis [J]. Chinese Journal of Tissue Engineering Research, 2026, 30(6): 1417-1423. |
| [3] | Cao Xinyan, Yu Zifu, Leng Xiaoxuan, Gao Shiai, Chen Jinhui, Liu Xihua. Effect of repetitive transcranial magnetic stimulation and transcranial direct current stimulation on motor function and gait in children with cerebral palsy: a network meta-analysis [J]. Chinese Journal of Tissue Engineering Research, 2026, 30(6): 1539-1548. |
| [4] | Zhou Jian, Zhang Tao, Zhou Weili, Zhao Xingcheng, Wang Jun, Shen Jie, Qian Li, Lu Ming. Effects of resistance training on quadriceps mass and knee joint function in patients with osteoporosis and sarcopenia [J]. Chinese Journal of Tissue Engineering Research, 2026, 30(5): 1081-1088. |
| [5] | Abudusalamu·Tuoheti, Xiao Yang, Wang Yixi, Musitapa·Mijiti, Chen Qihao, Maimaitiming·Saiyiti, Guo Hailong, Paerhati·Rexiti. Effects of three internal fixation techniques on biomechanics of adjacent segment degeneration in lumbar interbody fusion [J]. Chinese Journal of Tissue Engineering Research, 2026, 30(3): 586-595. |
| [6] | Zhou Feng, Fu Pengfei, Qian Yufan, Xu Pingcheng, Guo Jiongjiong, Zhang Lei. Correlation between spinal sagittal imbalance and knee joint parameters detected by whole-body EOS imaging [J]. Chinese Journal of Tissue Engineering Research, 2026, 30(3): 596-603. |
| [7] | Guo Jingwen, Wang Qingwei, He Zijun, Hu Zihang, Chen Zhi, Zhu Rong, Wang Yuming, Liu Wenfei, Luo Qinglu. Intra-articular injection of different concentrations of silicon-based bioceramics in treatment of knee osteoarthritis in rats [J]. Chinese Journal of Tissue Engineering Research, 2026, 30(2): 288-295. |
| [8] | Wang Yaping, Gao Tianyun, Wang Bin. Senescence of human bone marrow mesenchymal stromal cells with increasing age is not dependent on the mediation of endogenous retroviruses [J]. Chinese Journal of Tissue Engineering Research, 2026, 30(1): 10-20. |
| [9] | Zhou Jinhai, Li Jiangwei, Wang Xuquan, Zhuang Ying, Zhao Ying, Yang Yuyong, Wang Jiajia, Yang Yang, Zhou Shilian. Three-dimensional finite element analysis of anterior femoral notching during total knee arthroplasty at different bone strengths [J]. Chinese Journal of Tissue Engineering Research, 2025, 29(9): 1775-1782. |
| [10] | Fu Enhong, Yang Hang, Liang Cheng, Zhang Xiaogang, Zhang Yali, Jin Zhongmin. OpenSim-based prediction of lower-limb biomechanical behavior in adolescents with plantarflexor weakness [J]. Chinese Journal of Tissue Engineering Research, 2025, 29(9): 1789-1795. |
| [11] | Feng Zhimeng, Sun Ning, Sun Zhaozhong, Li Yuefei, Liu Changzhen, Li Sa. Three-dimensional image reconstruction can safely assist one-hole split endoscope in treatment of #br# L5/S1 far lateral lumbar disc herniation [J]. Chinese Journal of Tissue Engineering Research, 2025, 29(9): 1876-1882. |
| [12] | Wang Juan, Wang Guanglan, Zuo Huiwu. Efficacy of exercise therapy in the treatment of anterior cruciate ligament reconstruction patients: #br# a network meta-analysis #br# [J]. Chinese Journal of Tissue Engineering Research, 2025, 29(8): 1714-1726. |
| [13] | Chen Jing, Zhang Nan, Meng Qinghua, Bao Chunyu. Material characterization of finite element computational models of knee joints at different ages [J]. Chinese Journal of Tissue Engineering Research, 2025, 29(34): 7369-7375. |
| [14] | Yan Feng, Zhang Nan, Meng Qinghua, Bao Chunyu, Ye Lixin, Yu Jia. Finite element modeling of knee joint based on semi-automatic segmentation technology [J]. Chinese Journal of Tissue Engineering Research, 2025, 29(33): 7055-7062. |
| [15] | Wei Zhiheng, Guan Tianmin, Liu Qing, Gong Jue, Xiang Xianxiang. Application of 3D printing accurate osteotomy guide combined with the revision of anterior cruciate ligament with abnormally increased posterior slope of tibial plateau [J]. Chinese Journal of Tissue Engineering Research, 2025, 29(33): 7130-7136. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||